Die Vorbereitung, die getroffen werden muss, ist, dass sich die Blynk App mit dem Mikrocontroller verbinden muss. Dafür müssen im Programmcode die Wlan-Daten und der Authentifizierungstoken ergänzt werden. Außerdem sollte darauf geachtet werden, dass vor dem Start die Türen geschlossen sind. Ansonsten kann es sein, dass sich die Türen zu weit drehen. Die vorgesehene Bedienung des Briefkastens sieht wie folgt aus.
Den RFID-Chip vor dem RFID-Sensor halten, damit sich die Türen öffnen
Das Paket bzw. ein Gegenstand in den Briefkasten legen. Dann wird über die Blynk App eine Push Nachricht gesendet
Den Knopf betätigen, sodass sich die Türen wieder schließen
Mit dem RFID-Chip die Türen wieder öffnen und das Paket entnehmen
Mit dem Knopf die Türen wieder schließen
Bekannte Probleme:
Türen lassen sich nicht mit dem RFID-Chip öffnen. Dann muss die Stromversorgung so lange neu eingeschaltet werden bis es funktioniert. Nach dem ersten Mal funktioniert es meistens wieder.
Wenn der Briefkasten längere Zeit nicht genutzt wird, tritt das gleiche Problem auf wie bei Erstens und die Stromversorgung muss wieder neu eingeschaltet werden.
Das Projekt enthält zwei Motoren, die die Türen des Briefkastens öffnen. Dabei handelt es sich um Gleichstrommotoren, die mit maximal 12 Volt betrieben werden können. Die Motoren haben zwei Anschlüsse für Plus und Minus. Je nachdem, wie man beide Anschlüsse polt, dreht sich der Motor links- oder rechtsherum. Da der Mikrocontroller nur 5 Volt abgeben kann, die Motoren aber um die 12 Volt brauchen, muss eine externe Stromquelle genutzt werden. Zudem sind fast alle Pins am Mikrocontroller besetzt, wenn die beiden Motoren, der RFID-Sensor und der Abstandsensor angeschlossen werden. Also wird das D1Z Motodriver D1 Shield benötigt (siehe Abb.1). Mit dem Motordriver kann man zwei Motoren ansteuern und eine externe Spannungsquelle verwenden. An den Pins „VM” und „GND” wird die externe Spannungsquelle angeschlossen. An den Pins „A1″, „A2″, „B1″ und „B2″ wird jeweils paarweise ein Motor angeschlossen. Als externe Spannungsquelle werden sechs AA-Batterien verwendet. Der Motordriver kann einfach auf den Mikrocontroller gesteckt werden.
Abb.1: D1Z Motodriver D1 Shield 1
Das Motorshield wird über eine Bibliothek2 gesteuert, die man manuell in der Arduino IDE installieren muss.
//Motor Library
#include "WEMOS_Motor.h"
//Motor shiled I2C Address: 0x30
//PWM frequency: 1000Hz(1kHz)
Motor M1(0x30,_MOTOR_A, 1000);//Motor A
Motor M2(0x30,_MOTOR_B, 1000);//Motor B
//Hilfsvariable damit sich Türen nicht überdrehen
boolean isOpen = false;
//Oefnnet die Tueren des Briefkasten
void openDoor(){
//Abfrage damit Türen sich nicht überdrehen
if(isOpen){
return;
}
//Motoren drehen sich im Uhrzeigersinn mit Geschwindikeit SPEED
M1.setmotor( _CW, SPEED);
M2.setmotor(_CCW, SPEED);
//Motoren drehen sich für 1500 ms
delay(1500);
//Motoren werden angehalten
M1.setmotor(_STOP);
M2.setmotor(_STOP);
//Wird gesetzt damit sich Tuer wieder schliessen kann
isOpen = true;
}
//Schliesst die Tueren des Briefkastens
void closeDoor(){
if(!isOpen){
return;
}
M1.setmotor( _CCW, SPEED);
M2.setmotor(_CW, SPEED);
delay(1500);
M1.setmotor(_STOP);
M2.setmotor(_STOP);
isOpen = false;
}
Zuerst werden die beiden Motoren „M1″ und „M2″ definiert. Dazu ist eine Konstante für die Drehgeschwindigkeit und eine Hilfsvariable festgelegt. Die Hilfsvariable sorgt dafür, dass sich die Türen nicht überdrehen. In der Methode „openDoor” wird als Erstes überprüft, ob die Tür schon offen ist. Falls dies zutrifft passiert nichts. Sonst wird die Tür geöffnet. Ein Motor dreht sich im Uhrzeigersinn. Der Andere gegen den Uhrzeigersinn. Beide Motoren werden mit der Geschwindigkeit SPEED geöffnet und nach 1500 Millisekunden wieder angehalten. Nach dieser Zeit haben sich die Türen um ca. 90 Grad gedreht. Die Methode „closeDoor” funktioniert analog nur mit der entgegengesetzten Drehrichtung.
Die Schwierigkeit bei den Motoren war nicht der Programmcode an sich, sondern die technische Umsetzung. Gemeint ist das Finden der passenden Bibliothek, das Verschalten einer externen Stromquelle mit dem Mikrocontroller, die Funktionsweise des Motorshields und weiteres.
Für den Briefkasten wird ein Taster benötigt, damit man nach ablegen eines Pakets wieder die Tür schließen kann.
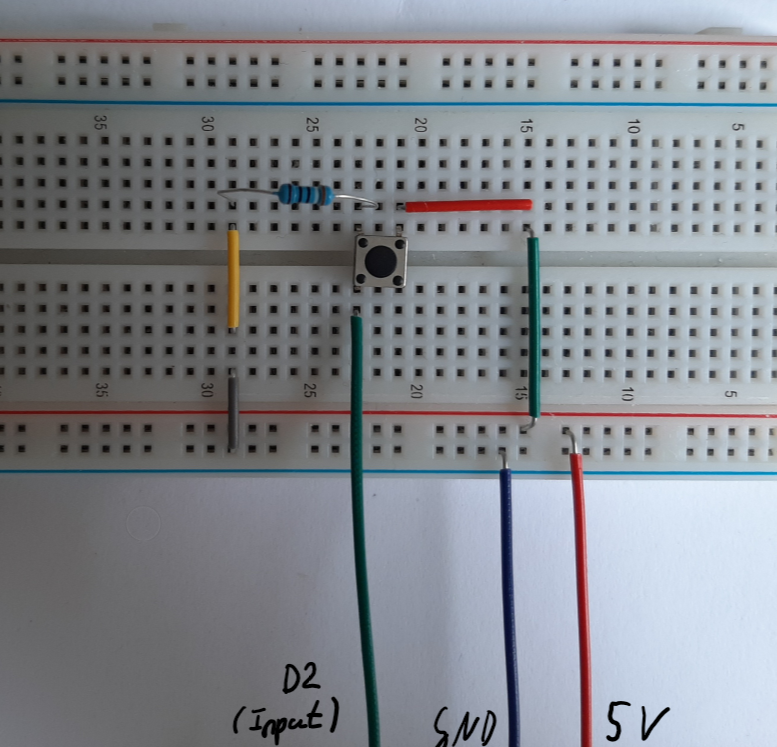
Sobald der Taster gedrückt wird, soll an einem Pin des Mikrocontrollers ein „High”-Signal anliegen. Ansonsten liegt ein „Low”-Signal vor. Dies kann mit der Schaltung in Abb.1 realisiert werden.
Abb.1: Schaltung für den Taster
Wenn der Taster gedrückt wird, dann wird die Spannung von der Spannungsquelle zum Pin des Mikrocontrollers durchgelassen. Wenn der Taster nicht gedrückt wird, dann liegt, durch den Widerstand, am Pin ein „Low”-Signal an.
Zuerst wird das Signal am Pin, an dem der Taster angeschlossen ist (hier D0), ausgelesen und in der Variable „taster” gespeichert. Wenn die Variable „taster“ den Wert „HIGH” hat, dann wird die Methode „closeDoor()” ausgeführt, die in einem anderen Blogeintrag erläutert wird.
Der Abstandssensor dient dazu eine Pushnachricht über Blynk zu senden, wenn sich ein Paket im Briefkasten befindet. Zuerst wurde recherchiert wie der Abstandssensor funktioniert. Der Abstandssensor wird mit 5 Volt betrieben und der „Out”-Pin wird an einen analogen Pin des Mikrocontrollers angeschlossen. Den Abstandssensor ist entsprechend mit dem Mikrocontroller verkabelt und wurde mit dem seriellen Monitor getestet. In dem seriellen Monitor werden Werte ausgegeben, welche der Abstandssensor misst. Sofern sich ein Gegenstand vor dem Abstandssensor befindet, wird ein anderer Wert ausgegeben, als wenn kein Gegenstand vor dem Abstandssensor stände. Dabei wurde auch noch die Empfindlichkeit des Abtsandsensors variiert. Beim Testen wurden zuerst scheinbar zufällige Werte ausgegeben, unabhängig davon, ob ein Gegenstand vor dem Abstandssensor steht oder nicht. Danach wurde selbiges in einer etwas abgedunkelten Umgebung gemacht. Dadurch wurden vernünftige Werte ausgegeben, wenn ein Gegenstand erkannt wurde. Mit diesen Informationen konnte die folgende Methode geschrieben werden.
void loop() {
while(Blynk.connected() == false){
Blynk.connect();
Serial.print(".");
}
Blynk.run();
if(packageDetected()){
delay(2000);
Blynk.notify("Du hast ein Paket bekommen!");
Serial.println("Paket");
}
}
/* Nutzt Abstandsensor, um Paket zu erkennen.
* Sendet eine Nachricht via Blynk, falls ein neues Paket geliefert wurde.
*/
boolean packageDetected(){
//Wert den der Abstandssensor ausgibt
int distance = analogRead(A0);
//Delay, da auslesen des A0 Pins sonst WLAN Verbindung stört
delay(100);
//Wenn ein Paket vorliegt und Nachricht noch nicht gesendet wurde
if(distance <= MAX_DISTANCE && package == false){
package = true;
return true;
}
//Wenn Paket entnommen wurde, dann setze alles auf Anfang, um neues Paket erkennen zu können
if(distance > MAX_DISTANCE){
package = false;
return false;
}
return false;
}
Dabei wurde „MAX_DISTANCE” auf 1000 gesetzt, da 1024 der Wert ist, den der Abstandssensor ausgibt, wenn sich ein Gegenstand davor befindet. Die Hilfsvariable „package” wird mit „false” initialisiert und dient dazu, dass die Pushnachricht nur einmal gesendet wird. „A0″ ist der Input Pin an dem die Werte des Abstandssensors gelesen werden. Die Methode funktioniert wie folgt: Zuerst wird in „distance” der Wert, den der Abstandssensor ausgibt, gespeichert. Wenn nun ein Paket in den Briefkasten gelegt wird, also der vom Abstandssensor ausgegebene Wert größer als 1000 ist, und noch keine Pushnachricht gesendet wurde, dann wird „true” zurückgegeben und eine Pushnachricht wird gesendet. Außerdem wird noch „package” auf „true” gesetzt, damit die Pushnachricht nur einmal gesendet wird. Wenn das Paket aus dem Briefkasten entnommen wird, also „distance” wieder kleiner als 1000 ist, dann wird „package” auf „false” gesetzt. Dadurch kann beim nächsten Paket wieder eine Pushnachricht gesendet werden. Schließlich wird „false” zurückgegeben.
In der Blynk App muss lediglich ein Notification Element hinzugefügt werden.
Heute habe ich viel mit dem Lötkolben gearbeitet. Zuerst musste ich auf unser Motor Shield drei Aufsätze löten, damit man das Motor Shield auf den Microcontroller stecken kann und die Motoren ansteuern kann. Anschließend habe ich an den Motor ein weiteres Kabel mit female Anschluss angelötet, um so den Motor an den male Anschluss des Motor Shields anschließen zu können. Das Problem war dabei, dass wir nur ein male to female Kabel hatten. Also musste ich mit einem Seitenschneider das male Ende abtrennen und anschließend die Kunststoffisolation ablösen, damit ich das Kabel an den Motor löten konnte. Mit dem Seitenschneider hat das erstaunlich gut funktioniert.
In den letzten Tagen habe ich mich mit den Grundlagen für die Programmierung beschäftigt. Als erstes habe ich mich wieder mit der Blynk App auseinandergesetzt, die wir benötigen, um den Briefkasten zu steuern. Dafür muss sich der Microcontoller mit der Blynk App verbinden. Als Test habe ich mit der Blynk App eine LED an- und ausgeschaltet. Anschließend habe ich recherchiert wie die einzelnen Komponenten, also Motoren und Abstandssensor angesteuert werden und wie diese funktionieren. Zudem musste ich mich auch wieder an die Syntax von C bzw. C++ gewöhnen, da wir im Studium hauptsächlich mit Java arbeiten. Zuletzt habe ich ein grobes Programm für den Abstandssensor geschrieben, dass eine Nachricht an die Blynk App schickt, sobald ein Paket erkannt wurde.
Die Abb.1 stellt die Funktion des smarten Briefkastens als Graph dar. Der Graph ist von oben links nach unten rechts zu lesen.
Im Folgenden wird die genauere Funktionsweise des Briefkastens beschrieben: Der Postbote kann mit seiner RFID Karte den Briefkasten selbstständig öffnen. Wenn der RFID-Sensor den richtigen RFID-Chip oder die richtige RFID-Karte einliest, wird ein entsprechendes Signal an den Mikrocontroller gesendet. Dieser öffnet dann die Türen. Nun kann der Postbote das Paket in den Briefkasten hineinlegen. Durch den Abstandssensor erkennt der Mikrocontroller, dass sich ein Paket im Briefkasten befindet. Anschließend sendet der Mikrocontroller mithilfe der Blynk App eine Pushnachricht an das Handy des Empfängers. Zuletzt kann der Postbote den Briefkasten über einen Tastschalter wieder schließen. Dieser ist an der Außenseite des smarten Briefkastens verbaut. Wenn der Empfänger wieder zu Hause ist, kann er über die Blynk App den Briefkasten öffnen und das Paket herausnehmen.