Der smarte Briefkasten besteht größtenteils aus ausgeschnittenen Holzplatten. Diese Holzplatten werden ausgeschnitten. Zum Ausschneiden der Platten für den smarten Briefkasten und deren Komponenten wurde der Makeblock Laserbox Pro von Anatolij Fandrich zur Verfügung gestellt. In der Abb.1 ist ein Bild der Laserbox zu sehen.
Abb.1: Makeblock Laserbox Pro 1Abb.2: Software „Laserbox“ 2Abb.3: Knopf der Laserbox 3
In Abb.2 ist die Benutzeroberfläche des dazugehörigen Programms „Laserbox“ zu sehen. Mit dem Programm kann man SVG-Dateien importieren.
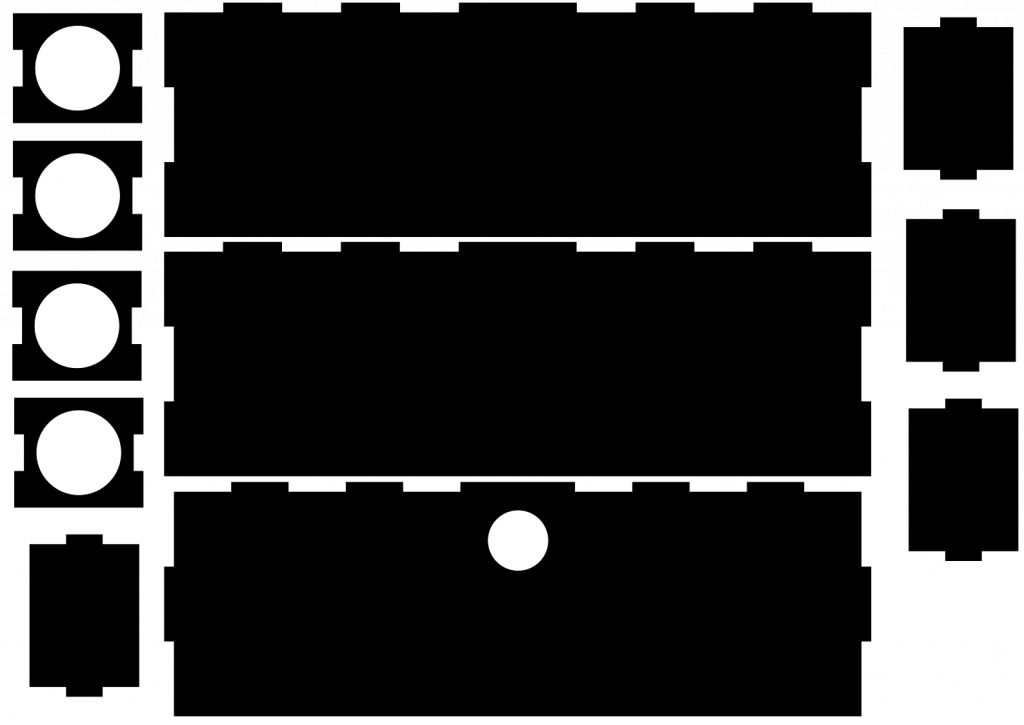
Abb.4: Formen für den Unterkasten
Die Abb.4 zeigt eine SVG-Datei, die zum Ausschneiden gebraucht wurde. Dort sind die Formen für den Unterkasten abgebildet. Zuvor legt man das entsprechende Material hinein. Durch die Kamera auf dem Deckel der Laserbox wird das Innere der Laserbox in dem Programm angezeigt. Als Nächstes richtet man die Bilddatei so zum hineingelegten Material aus, dass sich die auszuschneidenden Linien auf dem Material befinden. Dann stellt man oben in dem Dropdownmenü ein, um welches auszuschneidende Material es sich handelt. Dann kann man auf den blauen Play-Knopf oben rechts in dem Programm klicken (siehe Abb.2). Als Nächstes öffnet sich eine Pop-Up Fenster und man klickt auf „Send“. Daraufhin sendet das Programm die Daten an die Laserbox. Anschließend drückt man auf den silbernen Knopf rechts neben dem Deckel und die Laserbox schneidet dann die entsprechenden Formen aus. Abb.3 zeigt den silbernen Knopf auf der Laserbox. Sobald die Laserbox fertig mit dem Programm ist, kann man den Deckel öffnen und die Teile herausholen.
Abb.1: 3D Drucker “Elegoo Mars 2”1Abb.2: 3D-Drucksoftware “Chitubox” I Abb.3: 3D-Drucksoftware “Chitubox” II Abb.4: 3D-Drucksoftware “Chitubox” III
3D-Druck der Säulen
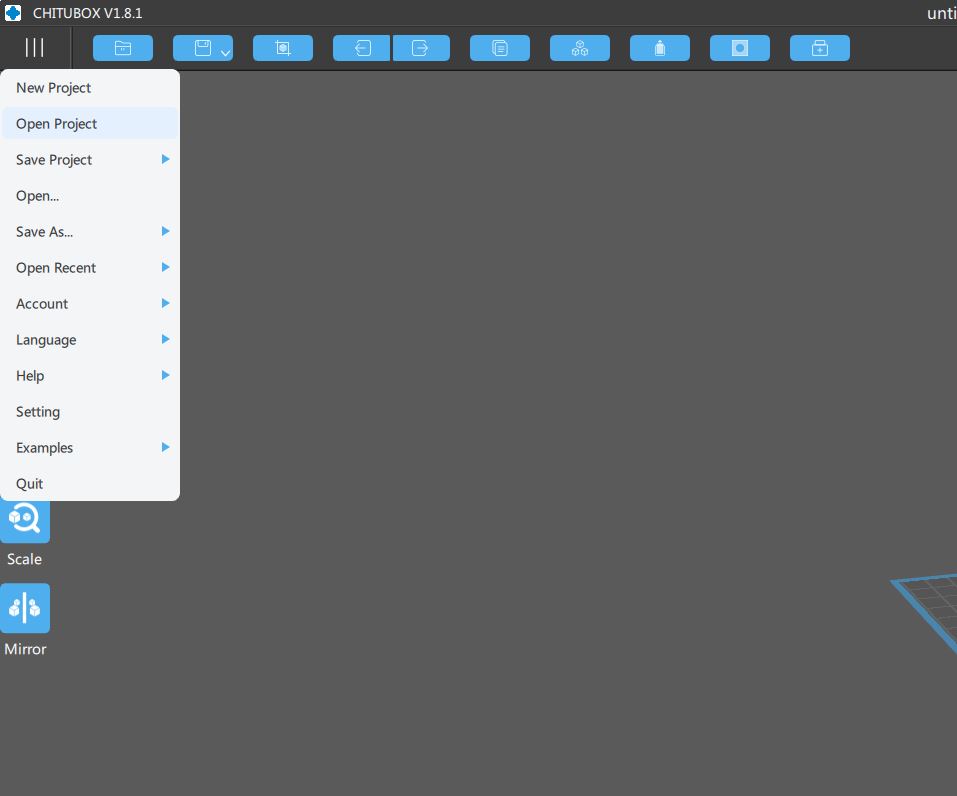
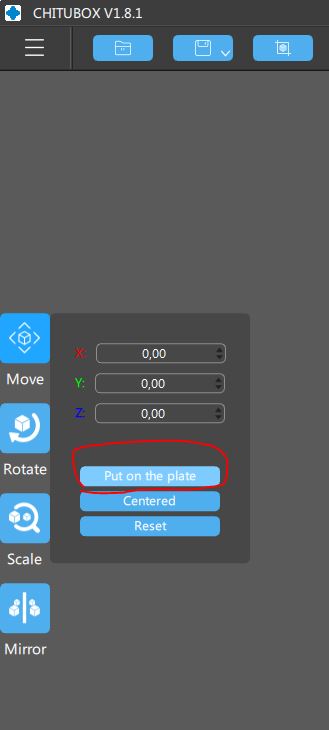
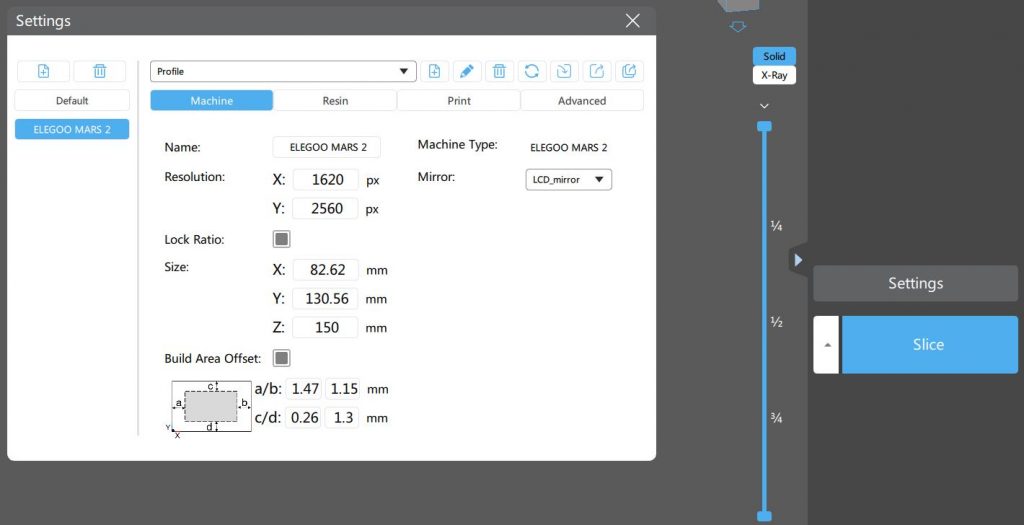
Die Säulen wurden mit einem Elegoo Mars 2 (siehe Abb.1) gedruckt. Dieser arbeitet mit flüssigem Resin, welches durch gezielte UV-Lichteinstrahlung aushärtet und somit präziser ist als ein Filament-Drucker. Das fertige 3D-Modell muss hierfür zuvor über die Software “Chitubox” gesliced werden. Ein Modell kann in der Software über das Symbol der drei Balken über “Open Project” geöffnet werden (siehe Abb.2). Die ausgewählten Modelle können über “Move” -> “Put on the plate” auf den Boden zentriert werden (siehe Abb.3). Vor dem Druck muss dann noch der 3D-Drucker ausgewählt werden (siehe Abb.4) und über “Slice” wird das Modell dann finalisiert und ist druckbereit.
Abb.5: 3D-Drucker “Dremel Digilab 3D45”2Abb.6: 3D-Drucksoftware “Dremel DigiLab 3D Slicer” I Abb.7: 3D-Drucksoftware “Dremel DigiLab 3D Slicer” II
3D-Druck der Schräge
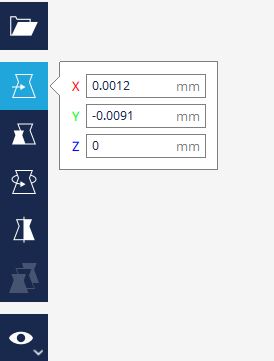
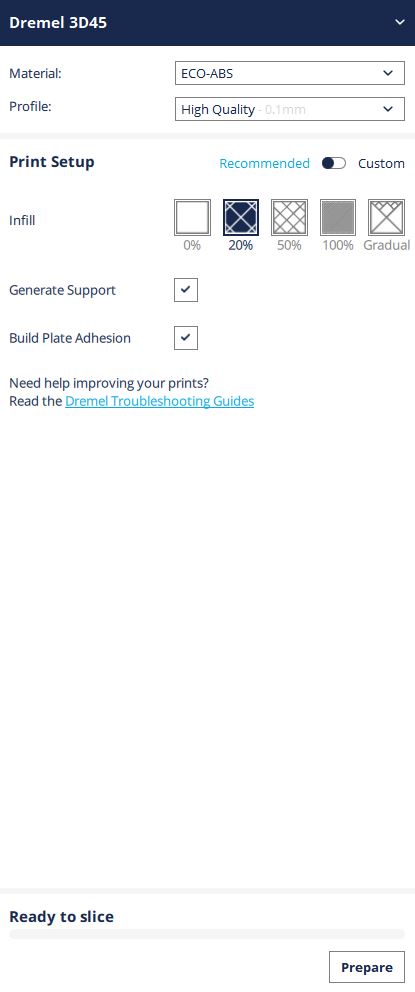
Die Schräge wurde mit einem Dremel Digilab 3D45 (siehe Abb.5) gedruckt. Dieser arbeitet mit 3D-Druck Filament, welches stabiler ist, als der Resin-Druck. Über den Reiter “Move” -> Z = 0 (siehe Abb.6) kann ein bereits geöffnetes Modell in der “Dremel DigiLab 3D Slicer” Software auf den Boden fixiert werden. Über “Infill” (siehe Abb.7) lässt sich die Füllstärke einstellen, bei der Schräge wurde ein Infill von 50% verwendet, damit diese stabiler ist. Über “Prepare” (siehe Abb.7) wird das Modell fertiggestellt und ist danach druckbereit.
Der Zusammenbau erstreckte sich über mehrere Tage, wobei dies keine hintereinander folgende Tage waren. Dabei wurde neben dem Zusammenbauen der beiden Kästen auch die Elektronik und ihre Funktionsweisen getestet.
Zusammenbau der beiden Kästen
Bis auf die Schräge, die Säulen, den Plexiglastüren und der Elektronik besteht der smarte Briefkasten aus Holzplatten. Bei den Holzplatten handelt es sich um Bastel-Sperrholz Platten, die 420 mm lang, 297 mm breit und 4 mm dick sind. Zum Ausschneiden der Holzplatten wurde der von Anatolij Fandrich zur Verfügung gestellte Makeblock Laserbox Pro verwendet. Die Schräge und die Säulen wurden mit jeweils mit einem 3D-Drucker gedruckt.
Zuerst wurde der Unterkasten gefertigt. Danach der Oberkasten. Die meisten Steckverbindungen lagen lose ineinander, sodass alle Holzplatten mit Holzleim geklebt wurden. Dazu gehören auch die Teile für die Motor- und Kugellagerhalterungen.
Bei dem Unterkasten wurden zuerst jeweils zwei Seitenwänden aneinandergeklebt. Dann wurden die Seitenwänden mit dem Boden des Unterkastens geklebt. Darauf folgte die Befestigung der Motorhalterungen und das Aneinanderkleben der zwei Holzplatten für den Deckel. Durch die quadratischen Bohrungen in den beiden Platten des Deckels und dem Holzpin, konnten die beiden Platten möglichst genau verleimt werden. Beim Kleben wurden die Platten so übereinandergelegt, dass die beide Bohrungen aufeinander waren. Gleichzeitig wurde der Holzpin mit hineingeklebt.
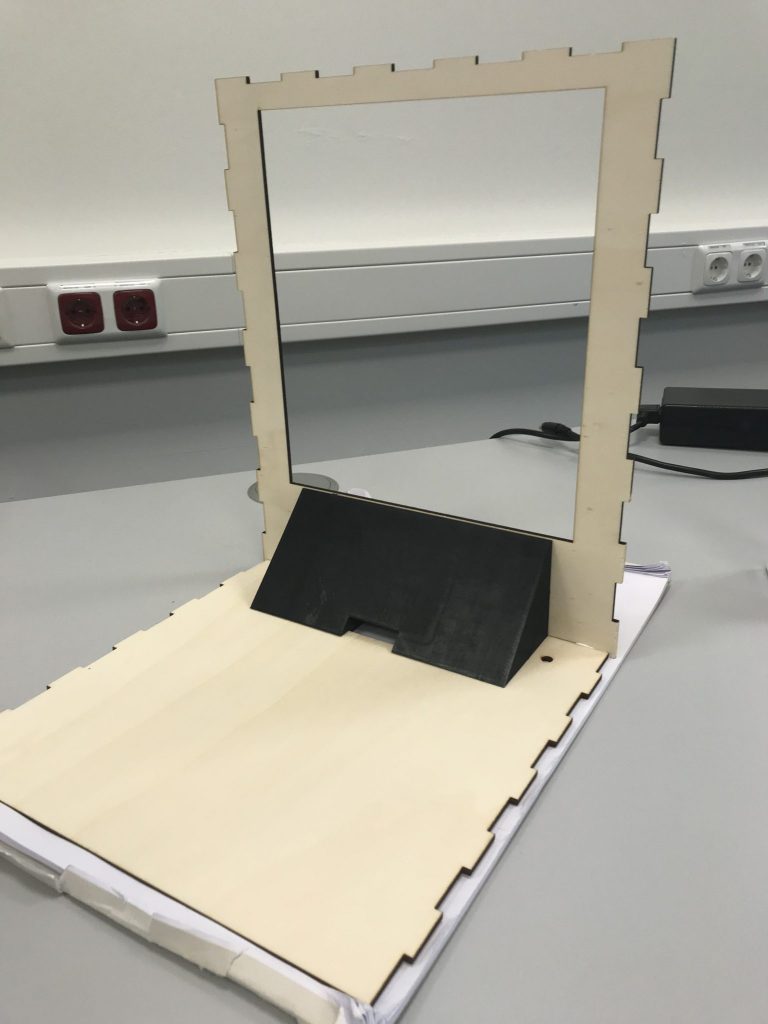
Abb.1: Unterkasten ohne Deckel
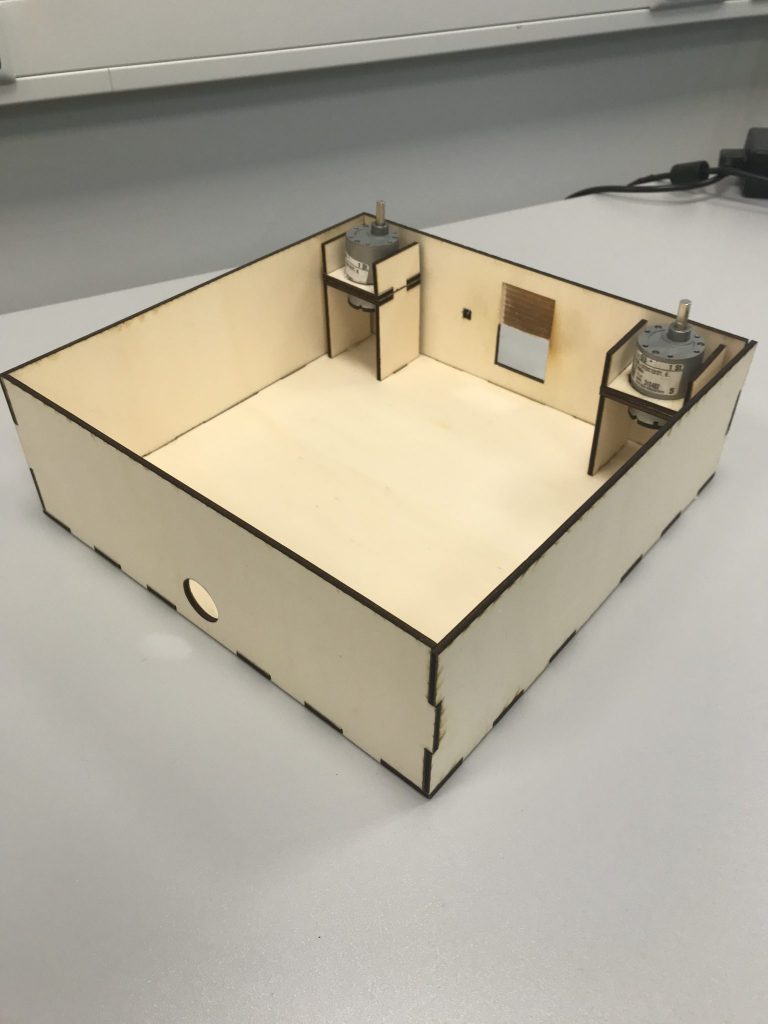
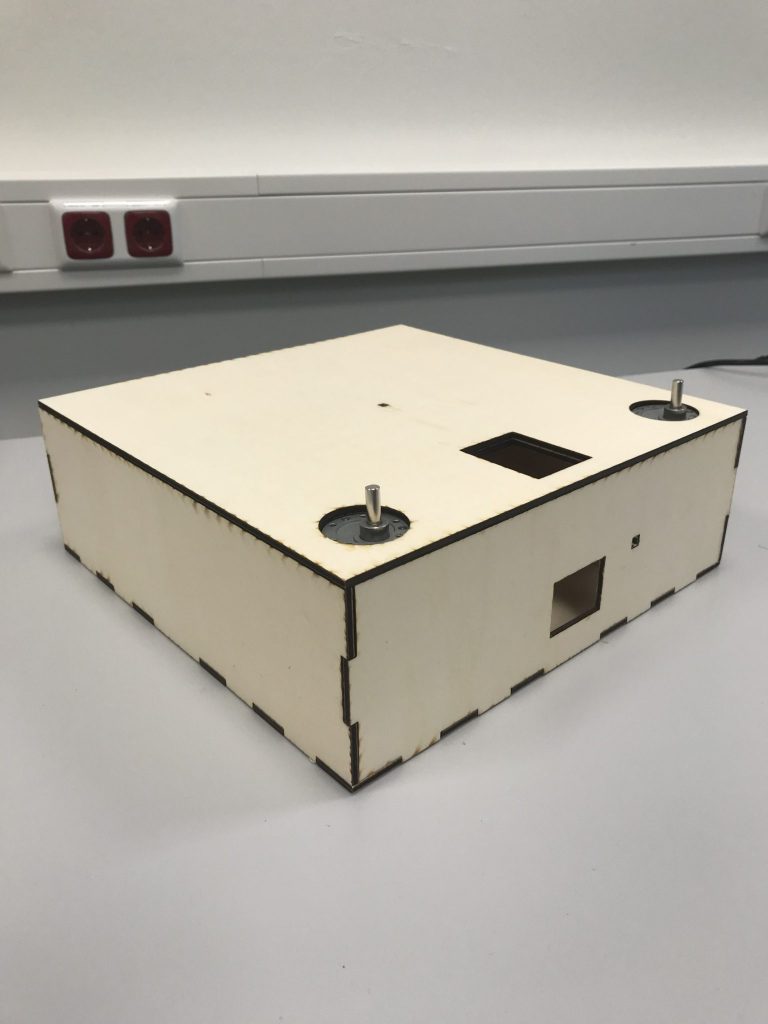
Die Abb.1 zeigt den zusammengebauten Unterkasten ohne Deckel, mit den hineingelegten Motoren und einem Tastschalter. Die Abb.2 zeigt den Unterkasten inklusive des Deckels. Wie es in den Blogeinträgen zur Modellierung bereits beschrieben wurde, ragen die Pins von den Motoren in den Oberkasten hinein. Die Motoren selbst jedoch befinden sich im Unterkasten.
Abb.2: Unterkasten mit Deckel
Beim Zusammenbauen des Oberkastens wurde zuerst die Schräge auf den Boden des Oberkastens eingebaut. Dabei wurde statt Holzleim Sekundenkleber verwendet, damit die Schräge auch wirklich haftet. Daraufhin wurde die Vorderseite des Oberkastens geklebt. Beim Kleben der Vorderseite wurde Sekundenkleber und Holzleim verwendet. Dabei wurde der Sekundenkleber auf die Seitenwand der Schräge und der Holzleim auf die Holz-Steckverbindungen der Bodenplatten verteilt. Durch die bereits befestigte Schräge wurde die Anbringung der Vorderseite einfacher. In Abb.3 sieht man wie die Bodenplatte, die Schräge und die Vorderseite miteinander verklebt sind.
Abb.3: Anfang des Zusammenbaus des Oberkastens
Als Nächstes folgte dann die Klebung der Seitenwände neben der Vorderseite des Oberkastens. Beim Kleben der Seitenwände hat man den Kasten auf die Seite gelegt. Dadurch kommt etwas Gewicht auf die Holzplatten, sodass die Seitenwände am Ende richtig befestigt sind. Das Kleben der beiden Holzplatten für die Rückwand entsprach das Kleben des Deckels des Unterkastens. Der einzige Unterschied war die Plattengröße.
Abb.4: Verbindungsstelle zwischen Unter- und Oberkasten
Der Deckel des Unterkastens wurde mit dem Boden des Unterkastens verklebt. Beim Aufeinanderlegen der beiden Kästen mit den Motoren ist leider festzustellen, dass der Oberkasten eine längere Seitenmaße hatte und dass die Motoren etwas zu weit aus dem Unterkasten hinausragen. Das bedeutet, dass die beiden Kästen nicht perfekt übereinander liegen. Die Vorderseite des Oberkastens sitzt nicht ganz auf dem Unterkasten und ragt dazu etwas über den Rand des Unterkastens hinaus. Daher wurde beim Verleimen nur ein Teil der Flächen mit Leim versehen. Beobachten lässt sich dies in Abb.5 und Abb.6. In Abb.4 kann man sehen, dass der Deckel des Unterkastens nicht ganz auf dem Unterkasten liegt. Wie erwähnt gibt es einen Konstruktionsfehler, bei dem die Motoren etwas zu weit nach oben ragen. Da der Deckel des Unterkastens mit dem Boden des Oberkastens verleimt ist, liegt der Deckel des Unterkastens nicht richtig auf dem Unterkasten.
Schließlich wurde die Decke des Oberkastens geklebt. An der Decke wurden zuvor die Kugellagerhalterungen verleimt und jedes Kugellager jeweils mit einem 608 ZZ Kugellager gefüllt, sodass man beim Einbauen der Säulen nur die Pins der Säulen in die Kugellagerhalterungen hineinstecken kann. In Abb.5 und Abb.6 sieht man die beiden zusammengeklebten Kästen aus zwei Perspektiven. Die Rückwand des Oberkastens ist nicht verleimt. Sie wird einfach an der Oberkasten gesteckt.
Abb.5: Die beiden Kästen aus der vorderen PerspektiveAbb.6: Die beiden Kästen aus der hinteren Perspektive
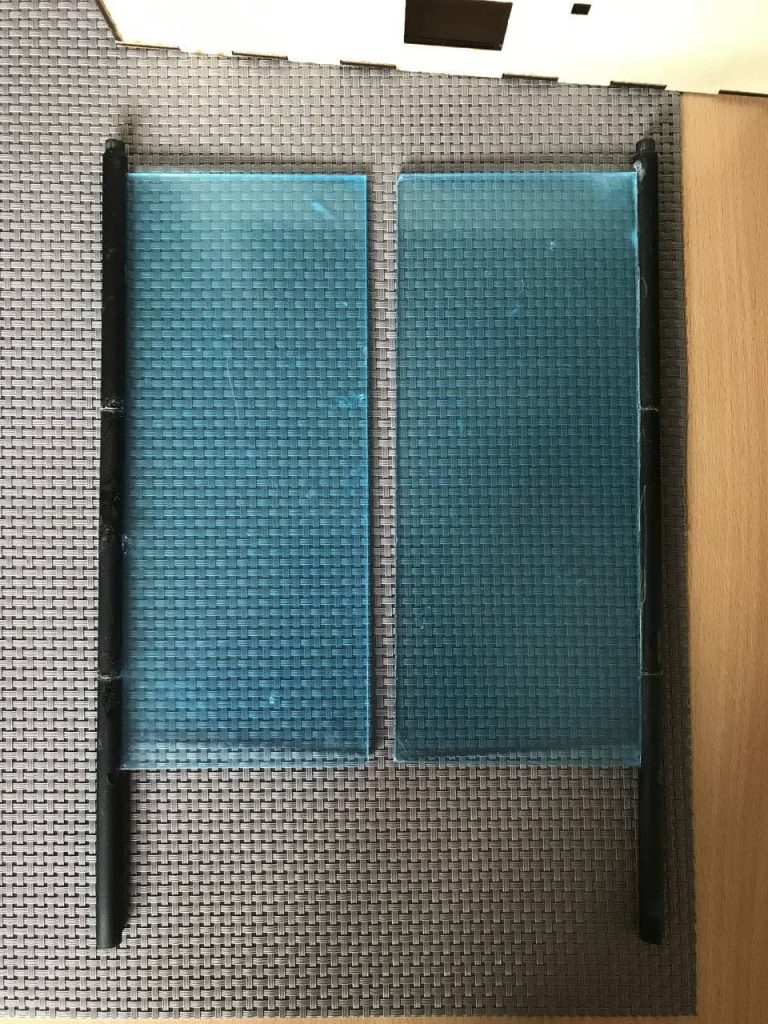
Die beiden Säulen sind jeweils aus drei Teilen zusammengebaut. Die 3 mm dicken Plexiglasplatten passten nicht in die Einkerbungen. Daher mussten die Säulen mit Pfeilen etwas nachbearbeitet werden. Anschließend wurden die jeweils drei Teile der Säulen nacheinander an den Plexiglasplatten verklebt. Hierbei wurde wieder der Sekundenkleber eingesetzt. In Abb.7 sieht man die beiden Säulen mit den verklebten Plexiglastüren.
Abb.7: Die Türen und Säulen
Die beiden Säulen in Abb.7 sind mit den Kugellagern in den Kugellagerhalterungen und den Motorpins im Innenraum des Oberkastens verbunden. Dabei wurden die Säulen zuerst mit den Kugellagern verbunden. Anschließend wurden die Motoren von unten in den Oberkasten hinein gesteckt und die Motorpins wurden in die Säulen gesteckt.
Zusammenbau der Elektronik
Für die Elektronik wurden insgesamt zwei ESP 8266 D1 Mini Mikrocontroller genutzt, da einer die Last des Programms nicht tragen konnte. Der erste Schaltkreis besteht aus einem Mikrocontroller und dem Abstandssensor. Durch diesem wird das Paket erkannt und der Nutzer durch eine Benachrichtigung der Blynk App informiert. Der Mikrocontroller ist lediglich mit dem Abstandssensor über die Pins „A0″ zur Datenübertragung, „5V” und „GND” verbunden. Diese drei Anschlüsse sind ebenfalls in Abb.11 erkennbar.
Der zweite Schaltkreis ist umfangreicher als der erste und besteht aus einem Mikrocontroller, dem RFID-Sensor, dem Motorshield, dem Tastschalter und der beiden Motoren.
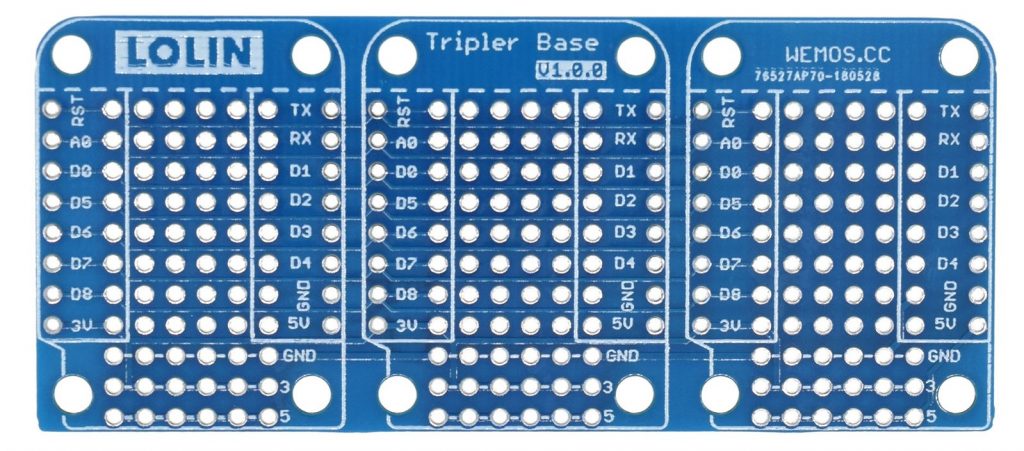
Abb. 8: Tripler Base 1
Um alle elektronischen Einzelteile miteinander verbinden zu können wurde eine Tripler Base genutzt. Diese ist in Abb. 8 zu sehen. Sie streckt die Pins des Mikrocontrollers, sodass insgesamt drei Shields gleichzeitig genutzt werden können. Die jeweils äußeren Reihen an den einzelnen drei Bases, wurde mit einer achter Stifteleiste verlötet. So konnte der Mikrocontroller auf die linke Base gesteckt werden. Hierdurch wurde jeder Pin mit dem gleichen Pin auf den anderen Bases verbunden. Zusätzlich konnten die unteren drei Reihen an jeder Base, welche mit „GND”, „3″ und „5″ beschriftet sind genutzt werden, um Ground, 3,3 Volt und 5 Volt weiterzureichen. Das Motorshield wurde daraufhin auf die mittlere Base gesteckt. Die mit dem RFID-Sensor verbundenen Kabel wurden in die Steckleiste gesteckt, die an den Mikrocontroller gelötet ist. Der Steckplan ist in dem Eintrag zum RFID-Sensor zu finden. Die Motoren und die Batteriebox wurden, wie in dem Eintrag zu den Motoren zu sehen, an das Motorshield verbunden. An den Tastschalter wurde ein Steckkabel gelötet, welches mit dem Pin „D0″ in der Steckleiste des Mikrocontrollers verbunden wurde. Dieses Steckkabel ist über dem Tastschalter mit einem der blauen Kabel verbunden, welches getrennt wurde. Zwischen den beiden Hälften des Kabels wurde ein Widerstand gelötet und das Ende des Kabels wurde an eine der Ground Leisten der Tripler Base gelötet. Ein weiteres Kabel wurde an ein Bein der zweiten Reihe des Tastschalters und an einer der 5 Volt Leisten der Tripler Base gelötet. Die fertig bearbeitete Tripler Base ist in Abb. 9 abgebildet.
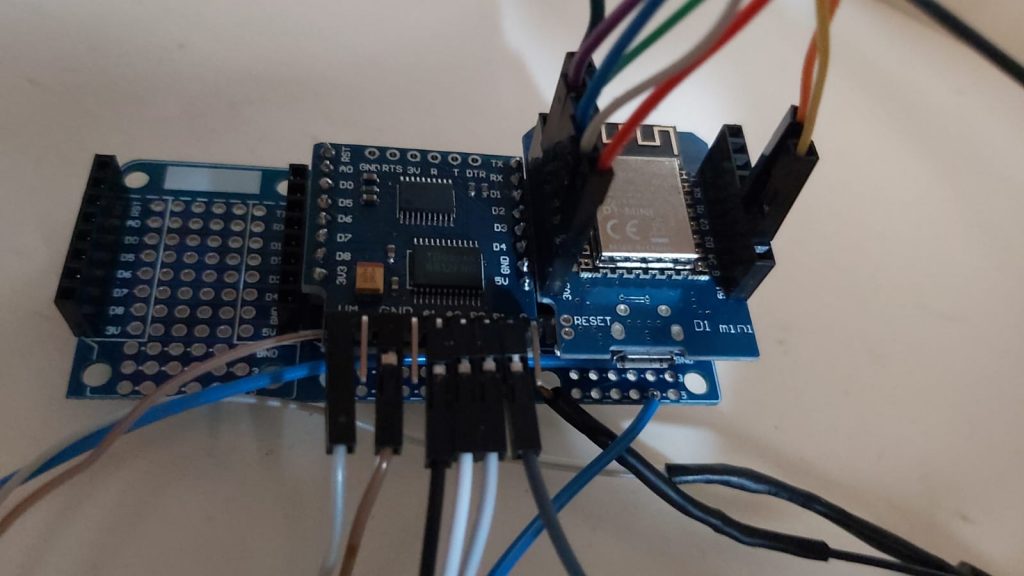
Abb. 9: Nahaufnahme der Tripler Base
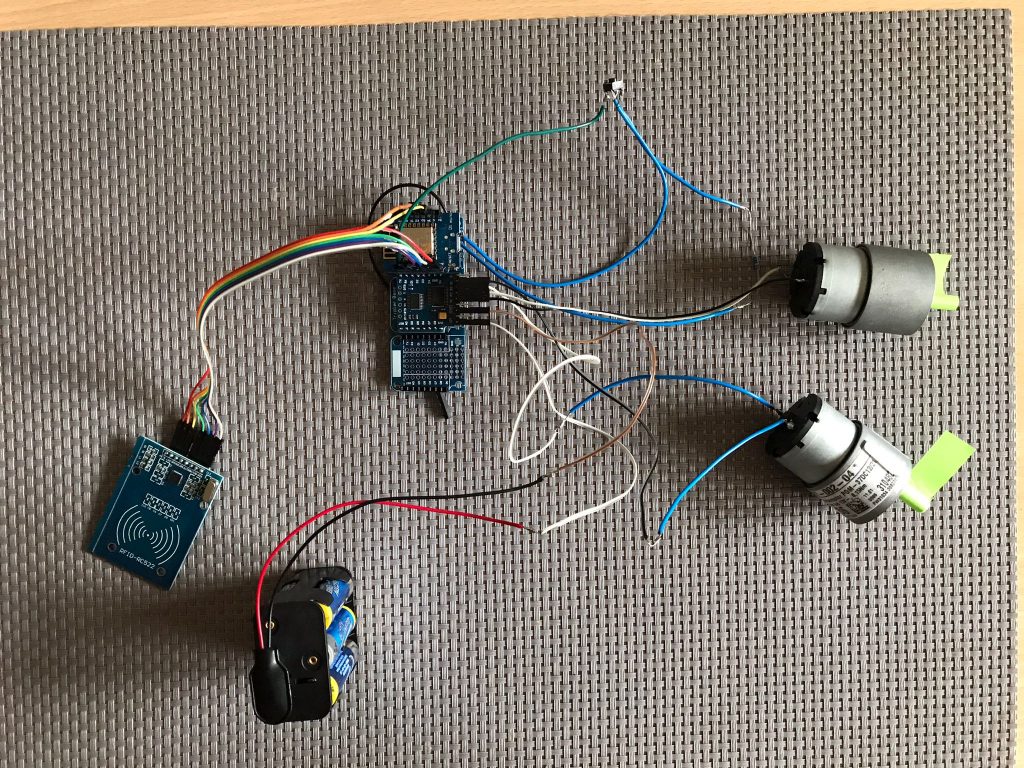
Die fertige Schaltung ist in Abb. 10 zu sehen.
Abb 10: Schaltkreis 2
Anbindung der Elektronik an die Kästen
Der RFID-Sensor und der Abstandssensor sind mit Heißkleber und der Tastschalter ist mit Sekundenkleber befestigt. Die Batterie-Box für das Motor-Shield ist mit Isolierband an einer Seitenwand des Unterkastens befestigt. Die Motoren befinden sich lose in den jeweiligen Halterungen. Die restliche Elektronik sitzt ebenso lose im Unterkasten. Die Verbindungen vom Abstandssensor zum Mikrocontroller und von den Motoren zu dem Motor-Shield besteht jeweils aus zwei Female-Male Jumper Kabel. Diese erleichtern das Abnehmen des Oberkastens vom Unterkasten, da beim Abnehmen des Oberkasten die Verbindungen der Motoren und des Abstandssensor unterbrochen werden müssen.
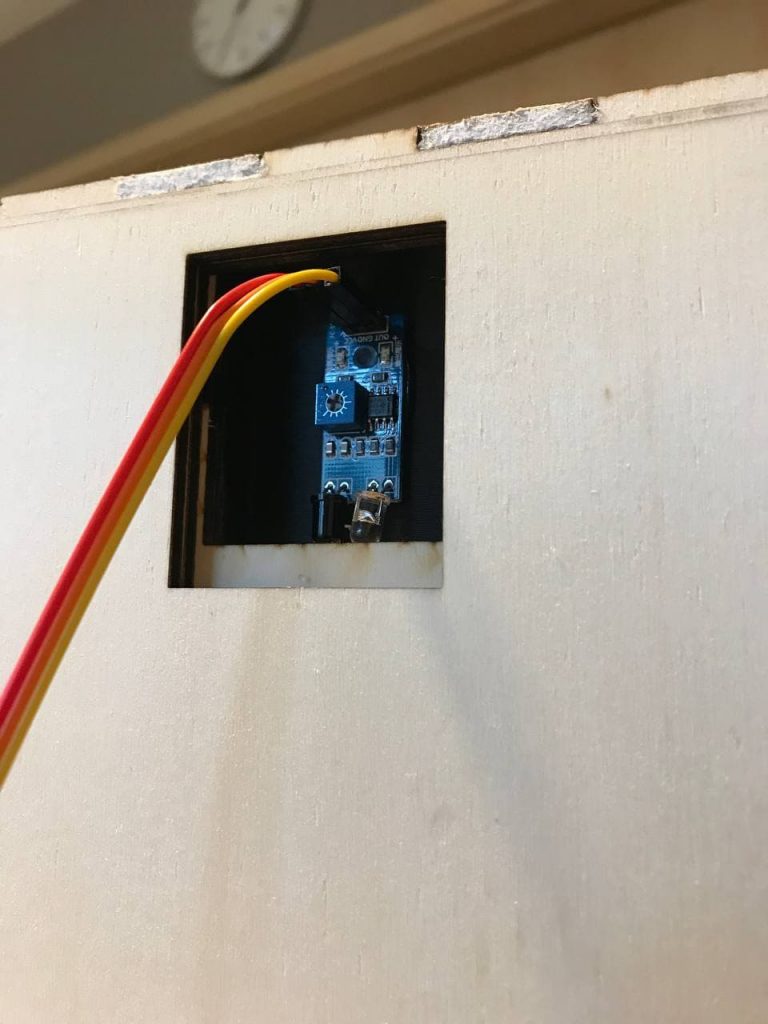
Der Abstandssensor ist in der Aussparung der Schräge befestigt. Die Pins des Abstandssensors sind um 90 Grad gebogen, damit es keine Probleme mit den Verbindungskabel gibt. In Abb. 11 sieht man wie der Sensor eingebaut ist.
Abb. 11: Der befestigte Abstandssensor
In Abb. 12 ist, bis auf den Abstandssensor und dem zugehörigen Mikrocontroller, die gesamte Elektronik im Unterkasten zu sehen.
Abb. 12: Die gesamte Elektronik im UnterkastenM1: Video zur Inbetriebnahme