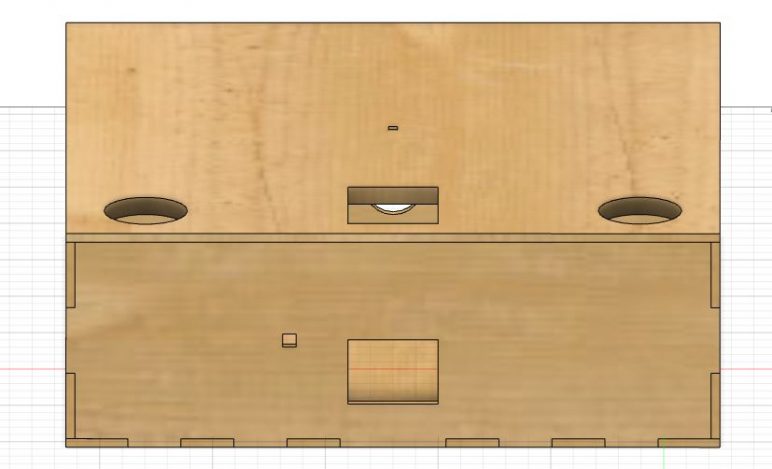
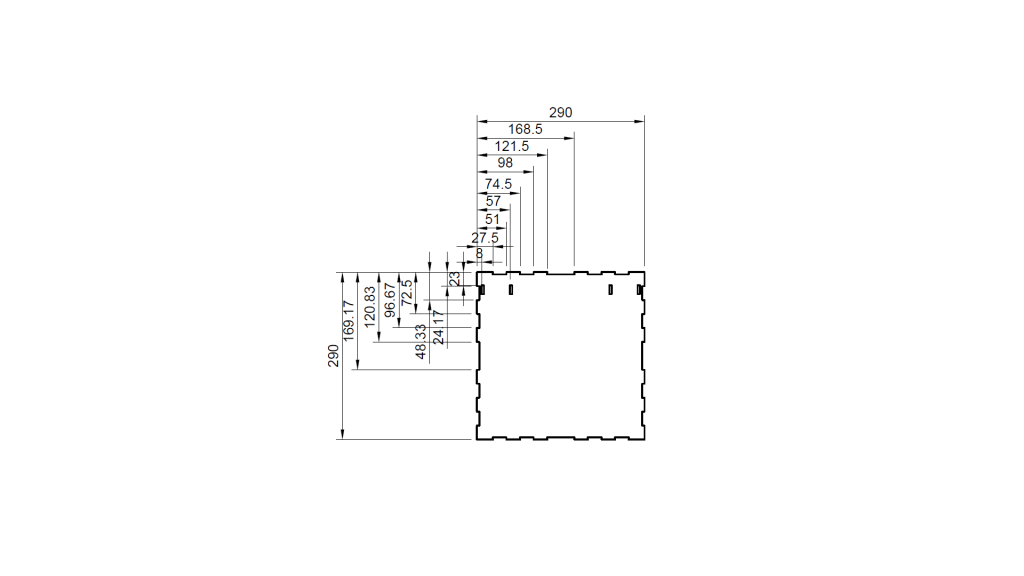
Vorstehend befindet sich die Abb.1, welche das Modell des Unterkastens abbildet.
Das Modell für den Unterkasten (siehe Abb.1) wurde mit der Software “Fusion 360” erstellt.
Der Unterkasten dient primär dazu, die Elektronik zu verstauen. Auf der Vorderseite sind Aussparungen für einen Taster und einen RFIP-Sensor. Auf der Oberseite befinden sind Aussparungen für die Motoren, Kabel für den Abstandssensor sowie für einen Verbindungsbolzen (4mmx4mmx8mm) für die Verbindung der beiden Oberplatten. Die Oberplatte wurde hierbei so entworfen, dass diese abnehmbar ist. Dadurch können Arbeiten an der Elektronik verrichtet werden. Auf der Rückseite befindet sich ein Loch für die Stromzufuhr. Die einzelnen Platten werden über eine Steckvorrichtung miteinander verbunden. Die Platten bestehen hierbei aus einem 4mm dicken Sperrholz. Der Unterkasten hat eine Länge und Breite von 290 mm und eine Höhe von 100 mm.
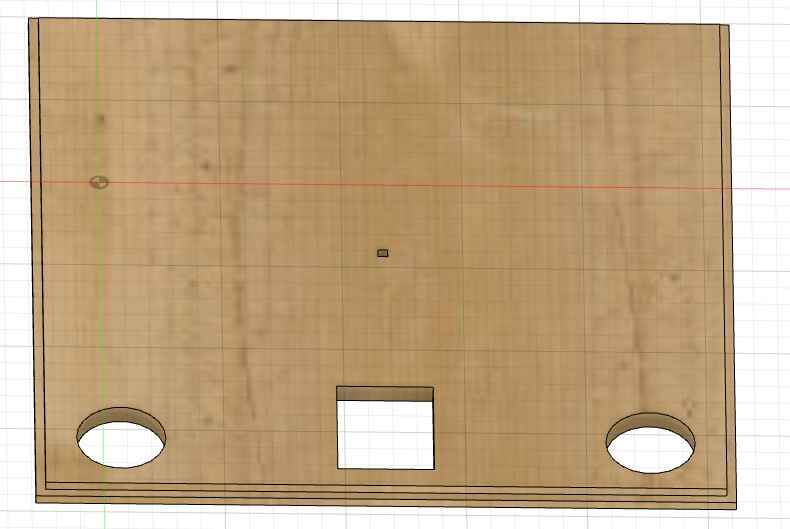
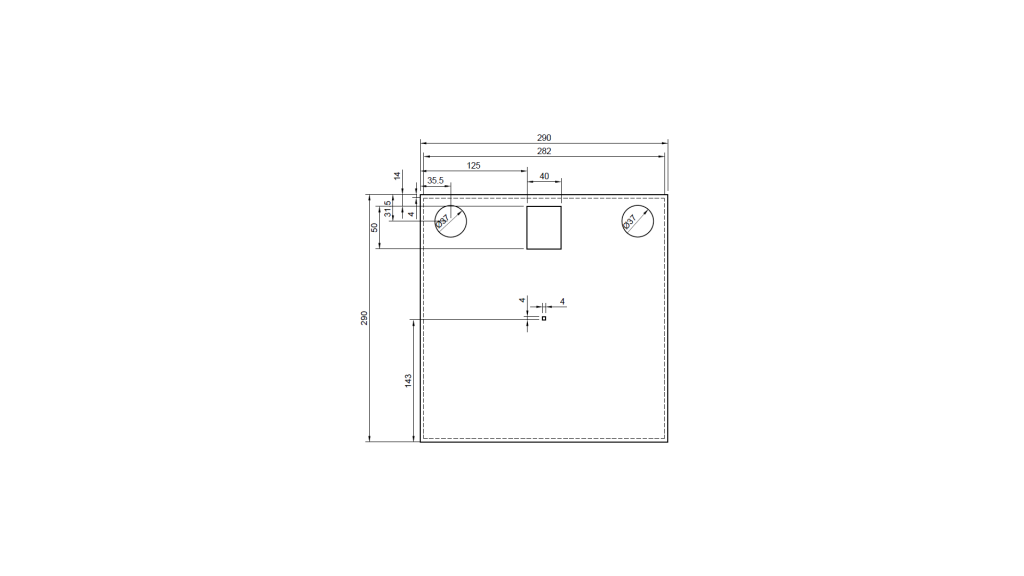
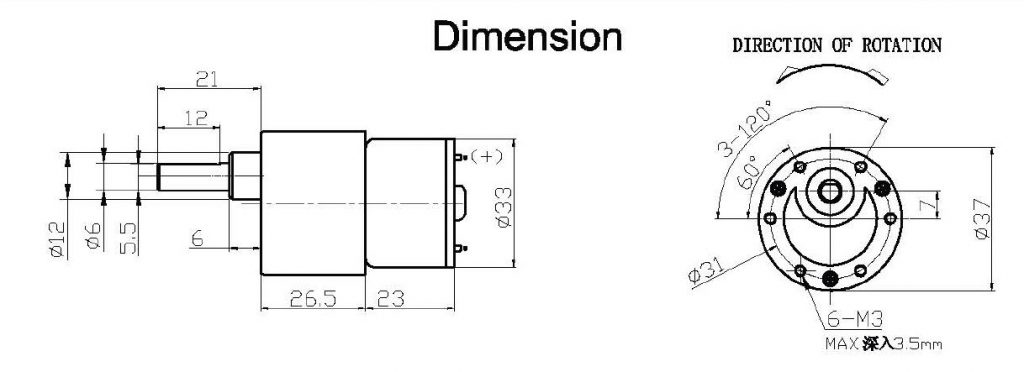
Der Deckel (siehe Abb.2) besteht aus zwei Platten, welche mit Hilfe des Bolzens verbunden werden. Die größere Platte hat hierbei eine Kantenlänge von 290 mm. Die kleinere Platte hat eine Kantenlänge von 282 mm. Bei der Modellierung des Deckels (siehe Abb.3) war zu beachten, dass bei einem dünnen Material der Abstand zwischen der Bohrung für die Motoren und den Außenkanten nicht zu hoch sein sollte, da das Material sonst brechen könnte. Die Bohrungen müssen hierbei einen Durchmesser von 37 mm für die Motoren haben (siehe Abb.4). Die Aussparung für die Kabel, welche sich zwischen den Bohrungen befinden, wurde von der oberen Box übernommen, damit diese besser übereinanderliegen können.

Bei der Bodenplatte sind die einzelnen und gegenüberliegenden Seiten symmetrisch gestaltet (siehe Abb.6), weshalb nur je eine Hälfte der Seite bemaßt wurde. Es befinden sich Aussparungen für die Motorhalterungen (siehe Abb.7) auf einer Seite der Bodenplatte, sodass diese besser fixiert werden können.
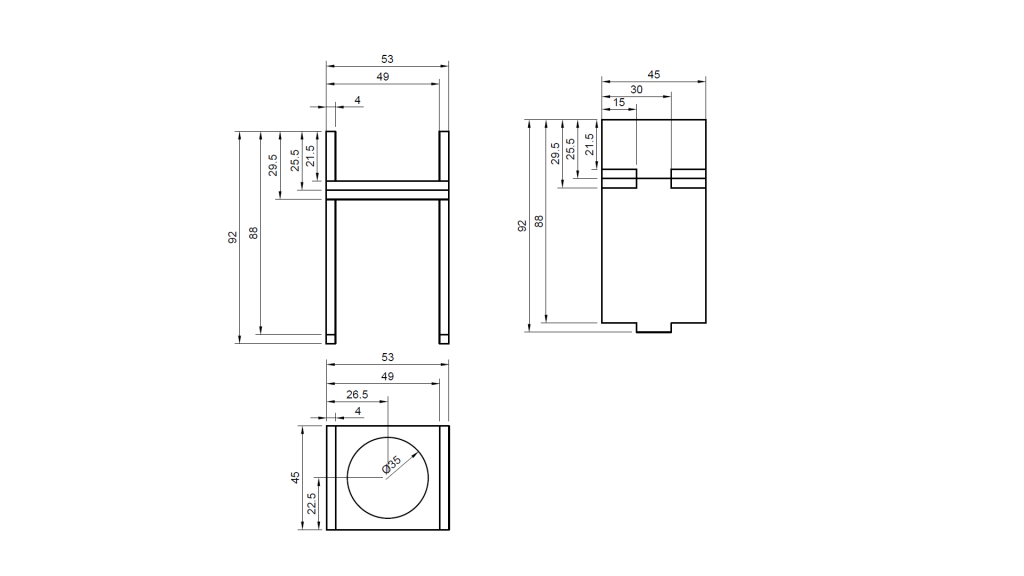
In Abb.7 ist die zuvor erwähnte Motorhalterung bemaßt. Diese wird wieder mit einem Stecksystem verbunden. Der Durchmesser der Bohrung ist hierbei auf den unteren Durchmesser des Motors (Abb.4) abgestimmt, sodass dieser ohne weitere Fixierungsmaßnahmen den eingehängten Motor hält. Die Halterung ist dabei 53 mm lang, 45 mm breit und 92 mm hoch. Sie ist mithilfe der Pins an der Bodenplatte (Abb.6) fixiert. Die Höhe ist hierbei darauf ausgelegt, dass die Halterungen nochmal von dem Deckel stabilisiert wird, damit die Bewegungsenergie der Motoren die Halterungen nicht verformt.
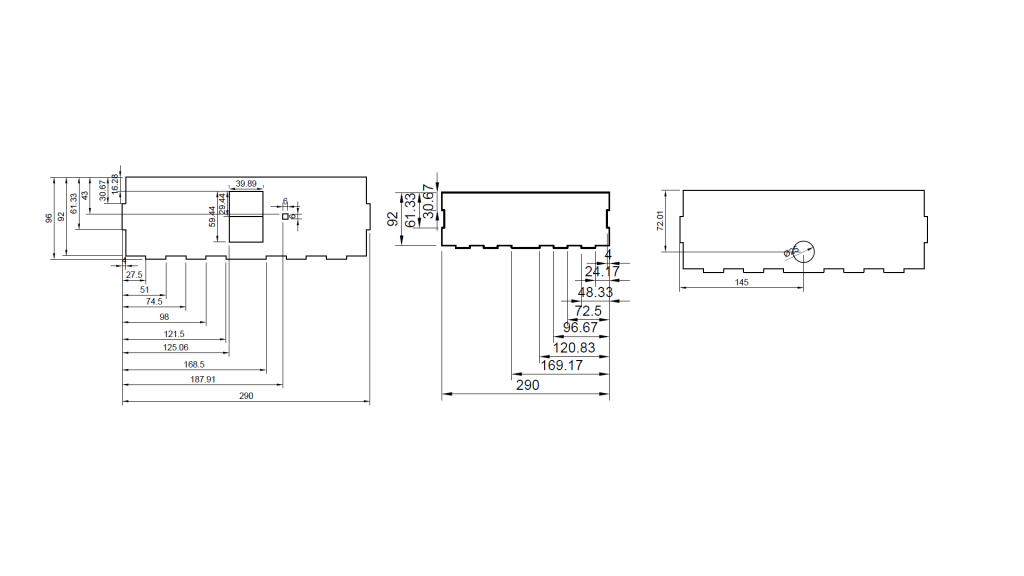
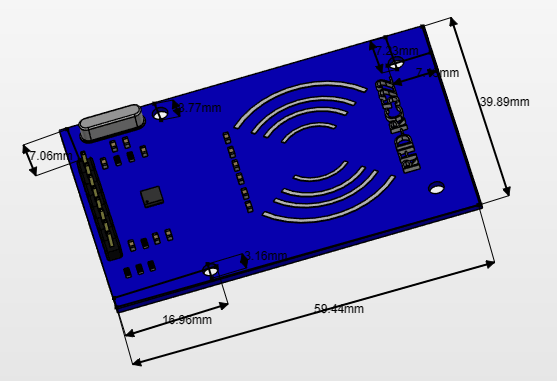
Die Abb.8 stellt die Bemaßung der Seitenwände dar, wobei das linkste Element die Vorderseite, das mittlere Element die beiden Seiten und das rechteste Element die Rückseite abbilden. Die Vorderseite ist 96 mm breit und eine Höhelänge von 290 mm. Sie beinhaltet eine Aussparung für den RFID-Sensor (siehe Abb.9), sodass dieser durch eine 2 mm Gravur des unteren Teils der Aussparung eingesetzt werden kann. Daneben befindet sich eine Aussparung für einen Standrad-Taster, welcher eine Länge und Breite von 6 mm besitzt.
Die Seitenwände haben die selben Grundmaßen wie die Vorder- und Rückseite (96mmx290mm). Die Rückseite beinhaltet eine Bohrung mit einem Durchmesser von 25 mm. Sie dient für die Stromversorgung und hat die selben Maßen für die Steckvorrichtung wie die Vorderseite.
1 Neuhold Elektronik “PGM-37DC12/21 Dimensions” 07.2011 N8725.indd (neuhold-elektronik.at)
2 Components101 “2D model of RC522 RFID module” 07.2015 RC522 RFID Module Pinout, Features, Specs & How to Use It (components101.com