Sämtliche Soll-Ziele wurden in der Projektdurchführung umgesetzt. Für die Umsetzung der Kann-Ziele war hingegen keine Zeit mehr vorhanden.
Das Zeitmanagement hat gut funktioniert, weshalb die Dokumentation am Ende der Projektdurchführung weniger stressig war als erwartet.
Durch Regelmäßige Discordtreffen und Besprechungen in Chats entstand eine gute Kommunikation, durch welche Fragen und Problemstellungen schnell aufgefangen wurden. Dadurch wussten alle Gruppenmitglieder, wie weit jeder Bereich des Projektes ist.
Lessons Learned
Die Belastungsfähigkeit der Mikrocontroller ist nicht endlos und sollte nicht zu stark ausgelastet werden.
Bei einem nächsten Projekt würden wir bei den Maßen der 3D Modelle die Toleranz besser beachten. Beim Zusammenbau des Briefkastens wurde beispielsweise festgestellt, dass es zwischen dem Ober- und Unterkasten einen kleinen Spalt gab. Außerdem mussten die Türsäulen etwas nachgebessert werden, damit sie auf die Motoren passen.
Des Weiteren sollte nächstes Mal der vollständig zusammengesetzte Code früher getestet werden. Zuerst wurden nur die einzelnen Funktionen getestet und am Ende erst alles zusammen. Dabei traten dann neue Fehler auf, die beim einzelnen Testen nicht passiert sind. Zuletzt sollten auch die Verbindungen zwischen den einzelnen Hardwarekomponenten gründlicher überprüft werden, bevor der Strom eingeschaltet wird. Da dies anfangs nicht gründlich genug gemacht wurde, ist ein Motor Shield kaputt gegangen.
Zudem wurden auch die Motoren einmal falsch angeschlossen. Dabei ist nichts kaputt gegangen, aber dafür wurde einige Zeit benötigt, um den Fehler zu finden. Es wurden Motoren und Kabel ausgetauscht und am Ende erst auf die Verkabelung geachtet, sodass der Fehler erst relativ spät bemerkt wurde.
Vergangene Woche haben wir uns zunächst intensiv mit der Dokumentation beschäftigt. Am Freitag haben wir uns dann nochmal als Gruppe getroffen, um den Zusammenbau abzuschließen. Dazu gehörte, dass wir zuerst die letzten Elektronikteile gelötet haben und gleichzeitig die letzten Teile des Kastens geleimt haben, sodass bei diesem nur noch die Elektronik eingesetzt werden musste.
Bei dem Testen der Elektronik ist uns leider aufgefallen, dass der Code nicht als gesamtes funktioniert und haben uns daher erstmal darum gekümmert, dass die einzelnen Funktionen funktionieren. Während des Zusammensetzens ist uns dann das Motorshield kaputt gegangen, weshalb wir erstmal für den Tag abbrechen mussten und nochmal Anatolij nach Ersatz gefragt haben.
Mit dem neuen Motorshield haben wir uns dann nochmal am Sonntag getroffen und nach dem Löten dieses Shieldes festgestellt, dass in der Funktion zwar der Punkt für die Bewegung der Motoren ausgeführt wurde, diese jedoch nicht ausgeführt wurde. Nach einer intensiven Fehlersuche und vielem Trial and Error ist uns dann aufgefallen, dass der Mikrokontroller wohl eine zu große Belastung hat und daraufhin haben wir dann erstmal den Abstandssensor abgesteckt.
Dadurch hat die Durchführung mit RFID, Taster und den Motoren funktioniert und wir haben die Lötstellen isoliert, bevor wir die Elektronik in den Kasten eingesetzt haben. Hierfür haben wir zunächst den RFID-Sensor, Taster und Abstandssensor mit Heißkleber an deren vorgesehenen Stellen im Kasten fixiert. Den Batteriehalter haben wir dann mit Isolierband im inneren des Kastens befestigt.
Danach haben wir nochmal die Funktionen getestet und nach einer Korrektur der Steckplätze der Motoren hat dann auch alles erstmal funktioniert, jedoch ist dies eher ein Glücksspiel, da sich der Mikrokontroller trotzdem zwischendurch immer mal wieder aufhängt. Später haben wir noch die Säulen fixiert und nochmal ein paar Testläufe gemacht, wodurch auffiel, dass ein früherer Fehler, durch welchen bei Doppeleingabe des Tasters/RFID-Sensors das Programm nicht mehr funktionierte, behoben wurde.
Zum Schluss haben wir dann noch den Code für den Abstandssensor mit der Push-Benachrichtigung auf einen zweiten Mikrokontroller gezogen und nochmal getestet. Nach Herumprobieren mit der Stellschraube des Abstandssensors hat dieser dann wieder das gewünschte Ergebnis erzeugt, jedoch konnte sich der Arduino nicht mit der Blynk-App verbinden.
Heute haben wir dieses Problem behoben und die Tage erfolgt dann noch der finale Funktionstest, sowie das Schreiben der noch fehlenden Einträge der Dokumentation.
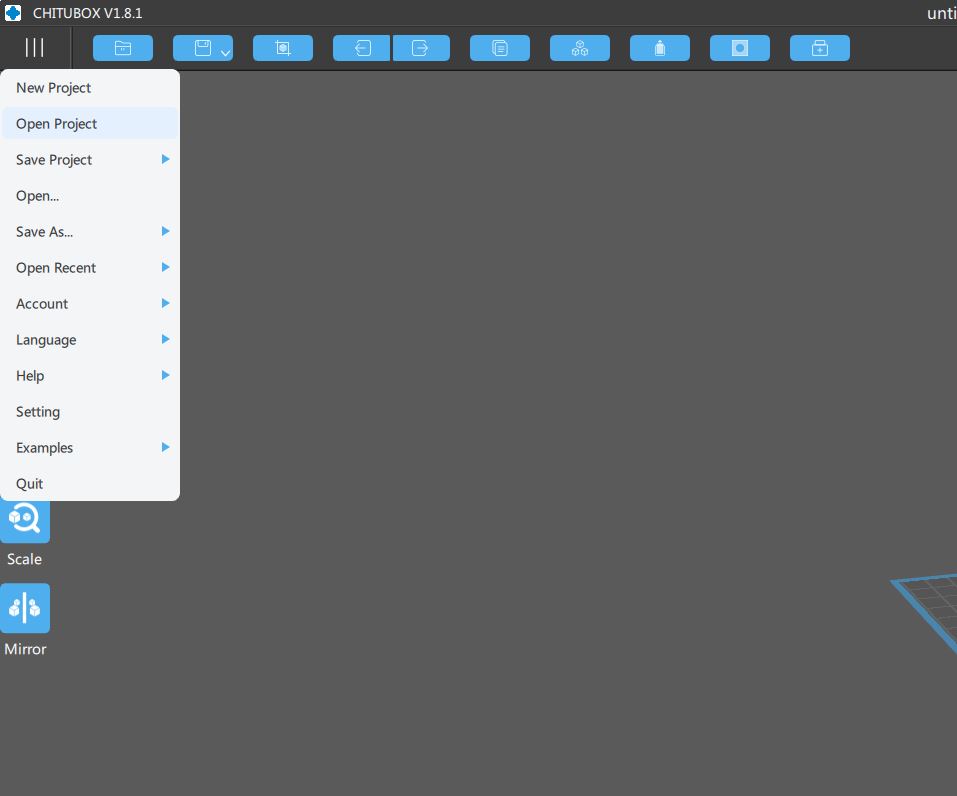
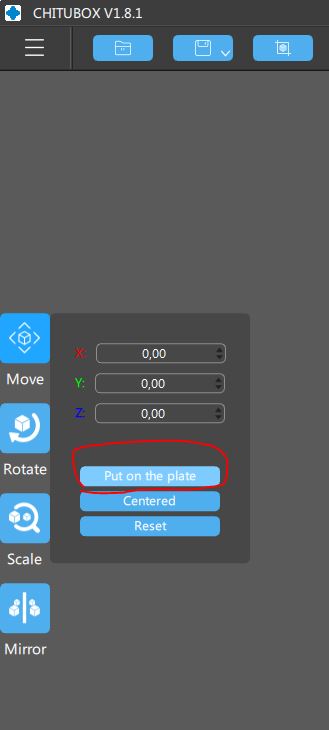
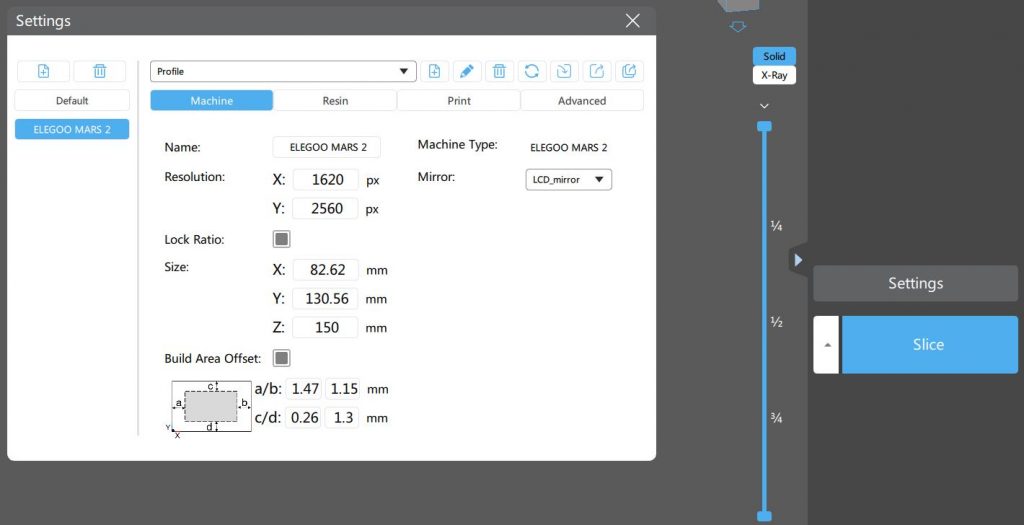
Abb.1: 3D Drucker “Elegoo Mars 2”1Abb.2: 3D-Drucksoftware “Chitubox” I Abb.3: 3D-Drucksoftware “Chitubox” II Abb.4: 3D-Drucksoftware “Chitubox” III
3D-Druck der Säulen
Die Säulen wurden mit einem Elegoo Mars 2 (siehe Abb.1) gedruckt. Dieser arbeitet mit flüssigem Resin, welches durch gezielte UV-Lichteinstrahlung aushärtet und somit präziser ist als ein Filament-Drucker. Das fertige 3D-Modell muss hierfür zuvor über die Software “Chitubox” gesliced werden. Ein Modell kann in der Software über das Symbol der drei Balken über “Open Project” geöffnet werden (siehe Abb.2). Die ausgewählten Modelle können über “Move” -> “Put on the plate” auf den Boden zentriert werden (siehe Abb.3). Vor dem Druck muss dann noch der 3D-Drucker ausgewählt werden (siehe Abb.4) und über “Slice” wird das Modell dann finalisiert und ist druckbereit.
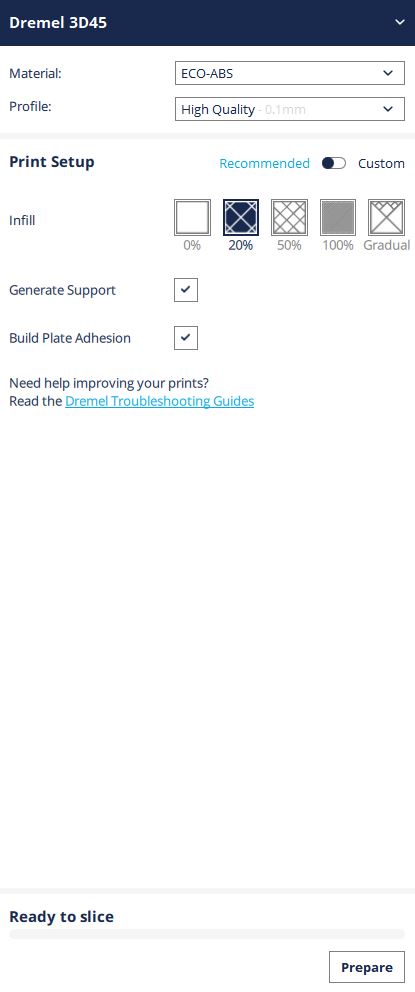
Abb.5: 3D-Drucker “Dremel Digilab 3D45”2Abb.6: 3D-Drucksoftware “Dremel DigiLab 3D Slicer” I Abb.7: 3D-Drucksoftware “Dremel DigiLab 3D Slicer” II
3D-Druck der Schräge
Die Schräge wurde mit einem Dremel Digilab 3D45 (siehe Abb.5) gedruckt. Dieser arbeitet mit 3D-Druck Filament, welches stabiler ist, als der Resin-Druck. Über den Reiter “Move” -> Z = 0 (siehe Abb.6) kann ein bereits geöffnetes Modell in der “Dremel DigiLab 3D Slicer” Software auf den Boden fixiert werden. Über “Infill” (siehe Abb.7) lässt sich die Füllstärke einstellen, bei der Schräge wurde ein Infill von 50% verwendet, damit diese stabiler ist. Über “Prepare” (siehe Abb.7) wird das Modell fertiggestellt und ist danach druckbereit.
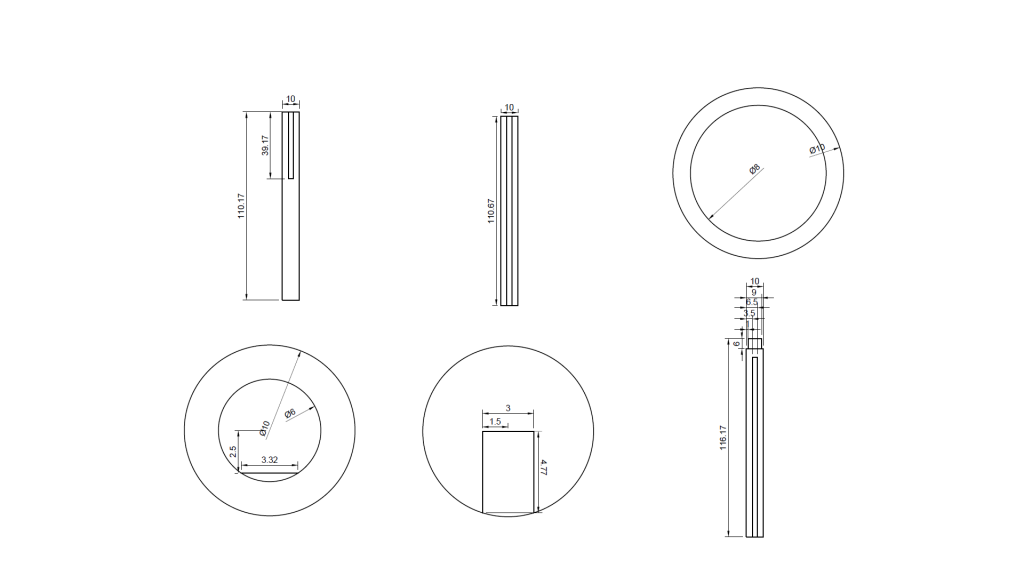
Vorstehend befindet sich Abb.1, welche das Modell der einzelnen Teile der Säule abbildet.
Abb.2: Modell zusammengesetzte Säule
In dem smarten Briefkasten sind jeweils zwei dieser Säulen verbaut (siehe Abb.2). Die Gesamthöhe pro Säule beträgt jeweils 330,5 mm. Der Durchmesser pro Säule beträgt 10 mm. Jede Säule hat eine Aussparung, welche 255 mm hoch und 3 mm breit ist. Die Aussparung ragt 4,77 mm in die Säule hinein. In diesen Aussparungen werden Plexiglasscheiben fixiert. Die obere Seite der Säule enthält einen Pin, welche die Säule mit dem Kugellager verbindet. Die untere Seite hat eine Vorrichtung für die Fixierung der Motoren. Die Säule wird mit einem 3D-Drucker gedruckt, da dies einfacher und präziser ist als andere Methoden.
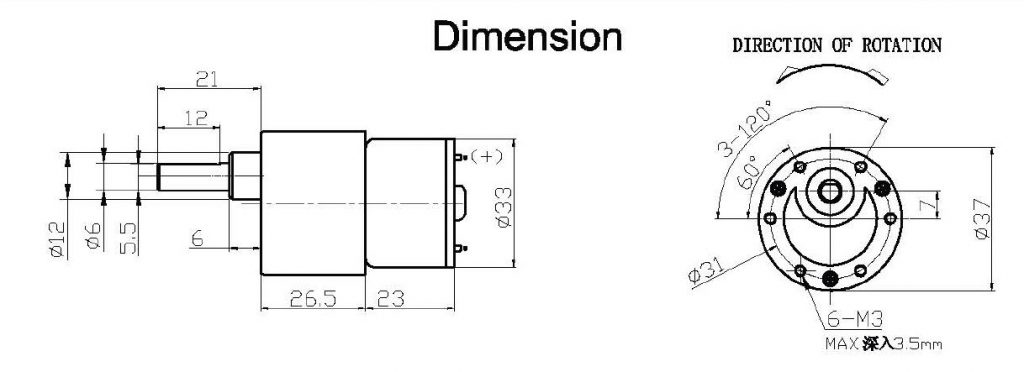
Abb.3: Bemaßung der SäulenAbb.4: Bemaßung der MotorenAbb.5: Bemaßung Kugellager1
In Abb.3 werden die drei Elemente der Säule abgebildet. Das Element links oben stellt hierbei den unteren Teil der Säule dar. Dieser hat eine Höhe von 110.47 mm und hat eine Aussparung (siehe Abb.3 unten links) für den Rotor des Gleichstrommotors (siehe Abb.4), damit eine Kraftübertragung mit möglichst wenig Verlust stattfinden kann. In der Mitte ist der mittlere Teil der Säule dargestellt, welcher eine Höhe von 110.67 mm hat. Darunter ist der Querschnitt der Fläche mit der Aussparung für die Plexiglasscheiben. Das Element rechts oben stellt den Pin für die Verbindung zum Kugellager (sieh Abb.5) dar. Das Element rechts unten ist der obere Teil der Säule und hat eine Höhe von 116.17 mm.
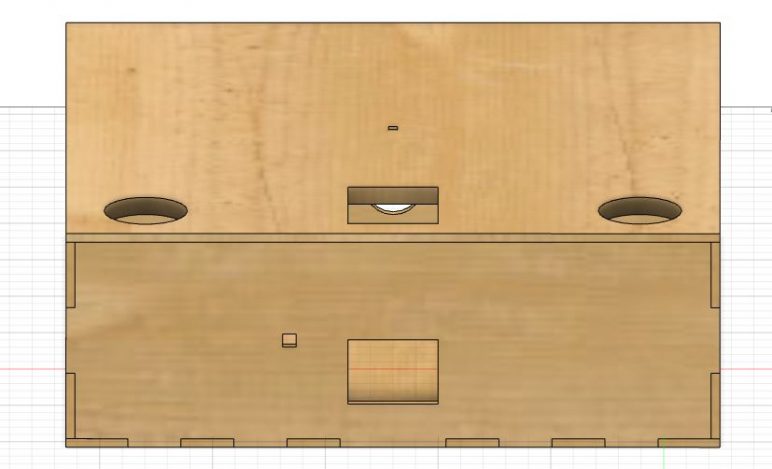
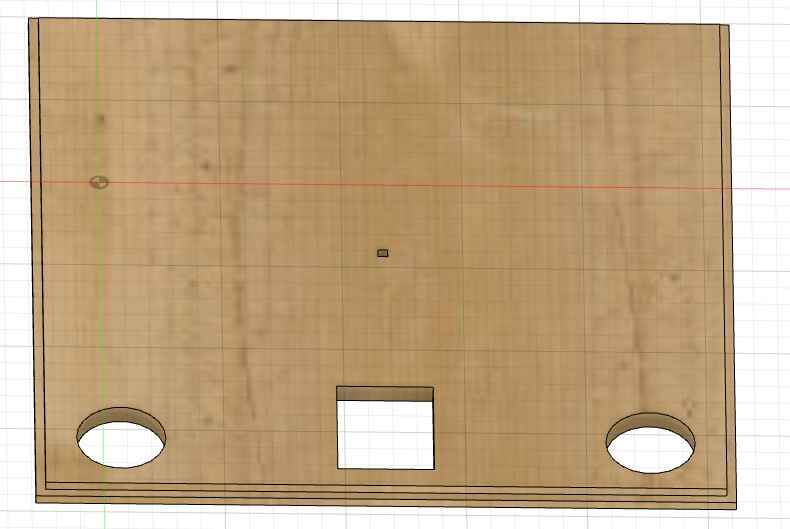
Vorstehend befindet sich die Abb.1, welche das Modell des Unterkastens abbildet.
Das Modell für den Unterkasten (siehe Abb.1) wurde mit der Software “Fusion 360” erstellt.
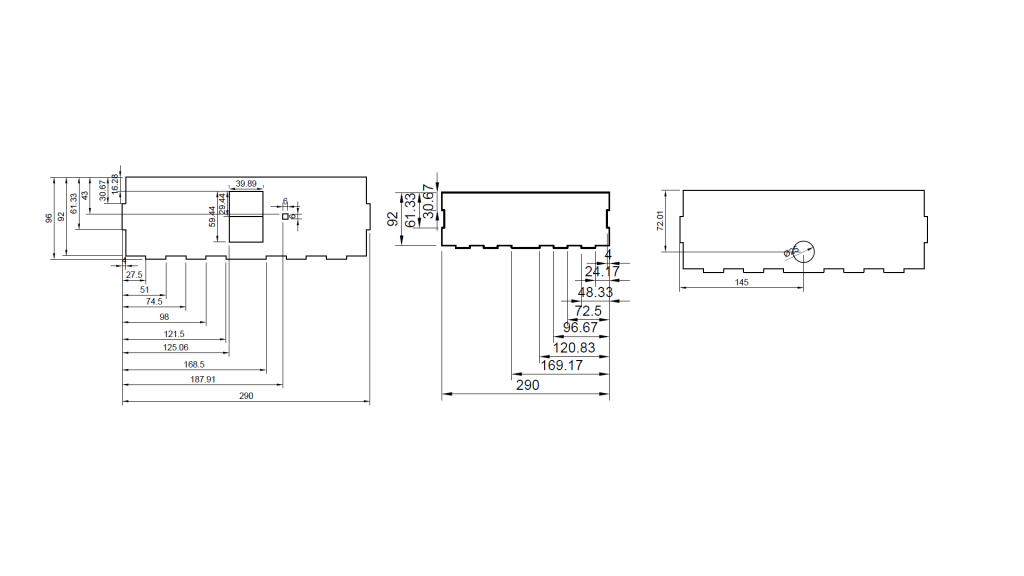
Der Unterkasten dient primär dazu, die Elektronik zu verstauen. Auf der Vorderseite sind Aussparungen für einen Taster und einen RFIP-Sensor. Auf der Oberseite befinden sind Aussparungen für die Motoren, Kabel für den Abstandssensor sowie für einen Verbindungsbolzen (4mmx4mmx8mm) für die Verbindung der beiden Oberplatten. Die Oberplatte wurde hierbei so entworfen, dass diese abnehmbar ist. Dadurch können Arbeiten an der Elektronik verrichtet werden. Auf der Rückseite befindet sich ein Loch für die Stromzufuhr. Die einzelnen Platten werden über eine Steckvorrichtung miteinander verbunden. Die Platten bestehen hierbei aus einem 4mm dicken Sperrholz. Der Unterkasten hat eine Länge und Breite von 290 mm und eine Höhe von 100 mm.
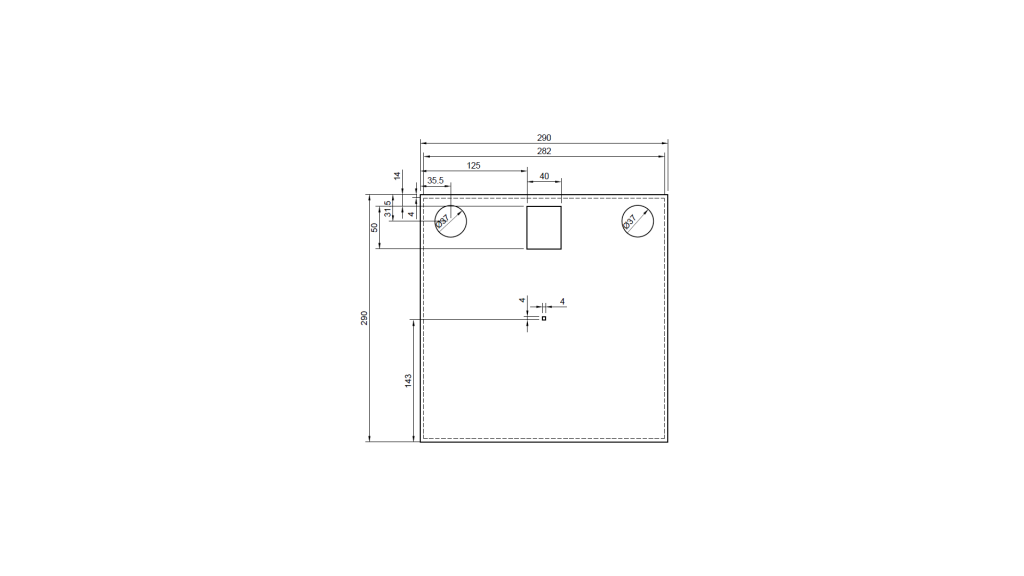
Abb.2: Modell vom DeckelAbb.3: Bemaßung vom DeckelAbb.4: Bemaßung der Motoren1
Der Deckel (siehe Abb.2) besteht aus zwei Platten, welche mit Hilfe des Bolzens verbunden werden. Die größere Platte hat hierbei eine Kantenlänge von 290 mm. Die kleinere Platte hat eine Kantenlänge von 282 mm. Bei der Modellierung des Deckels (siehe Abb.3) war zu beachten, dass bei einem dünnen Material der Abstand zwischen der Bohrung für die Motoren und den Außenkanten nicht zu hoch sein sollte, da das Material sonst brechen könnte. Die Bohrungen müssen hierbei einen Durchmesser von 37 mm für die Motoren haben (siehe Abb.4). Die Aussparung für die Kabel, welche sich zwischen den Bohrungen befinden, wurde von der oberen Box übernommen, damit diese besser übereinanderliegen können.
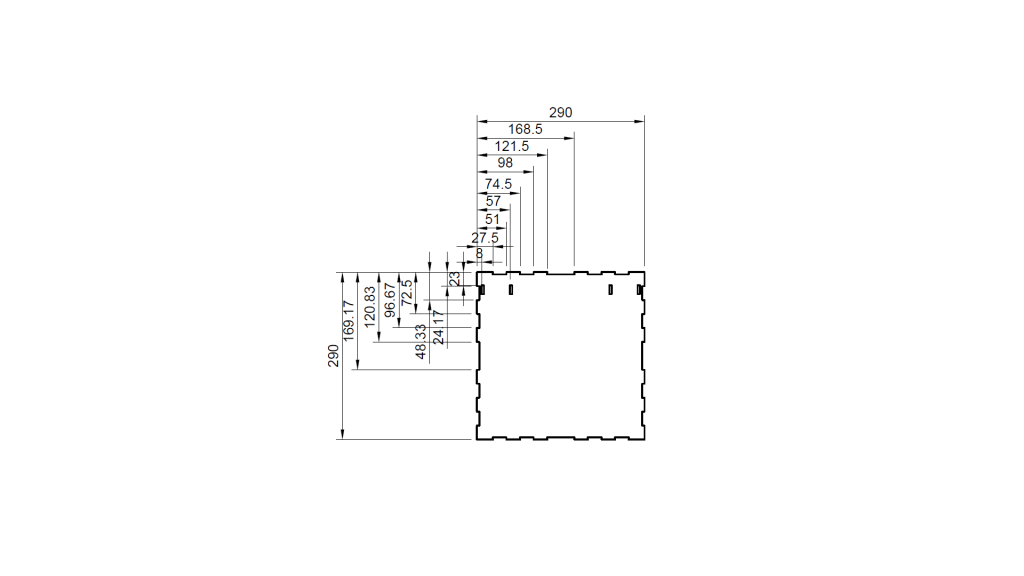
Abb.5: Modell vom Unterkasten ohne DeckelAbb.6: Bemaßung der Bodenplatte
Bei der Bodenplatte sind die einzelnen und gegenüberliegenden Seiten symmetrisch gestaltet (siehe Abb.6), weshalb nur je eine Hälfte der Seite bemaßt wurde. Es befinden sich Aussparungen für die Motorhalterungen (siehe Abb.7) auf einer Seite der Bodenplatte, sodass diese besser fixiert werden können.
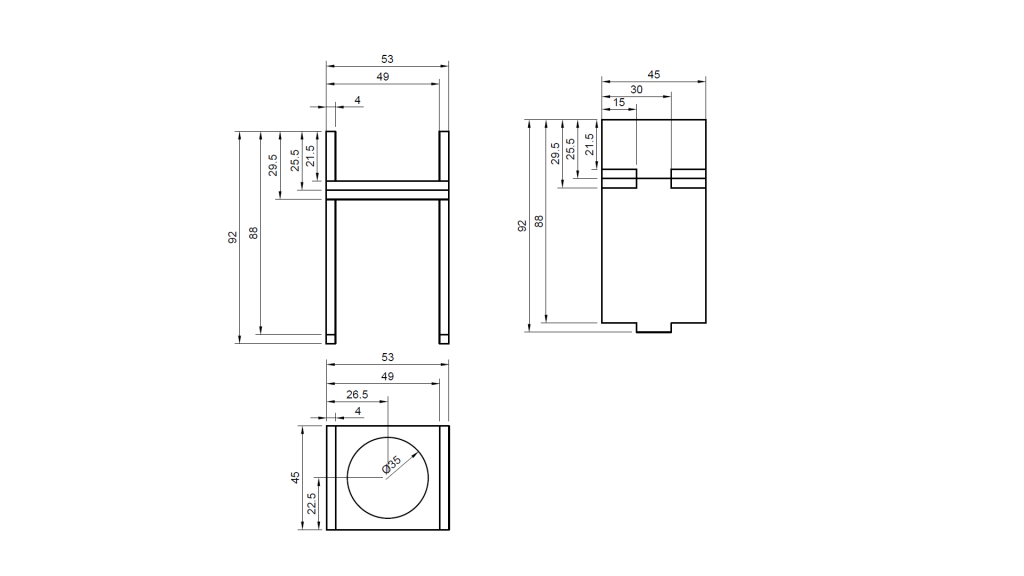
Abb.7: Bemaßung der Motorhalterung
In Abb.7 ist die zuvor erwähnte Motorhalterung bemaßt. Diese wird wieder mit einem Stecksystem verbunden. Der Durchmesser der Bohrung ist hierbei auf den unteren Durchmesser des Motors (Abb.4) abgestimmt, sodass dieser ohne weitere Fixierungsmaßnahmen den eingehängten Motor hält. Die Halterung ist dabei 53 mm lang, 45 mm breit und 92 mm hoch. Sie ist mithilfe der Pins an der Bodenplatte (Abb.6) fixiert. Die Höhe ist hierbei darauf ausgelegt, dass die Halterungen nochmal von dem Deckel stabilisiert wird, damit die Bewegungsenergie der Motoren die Halterungen nicht verformt.
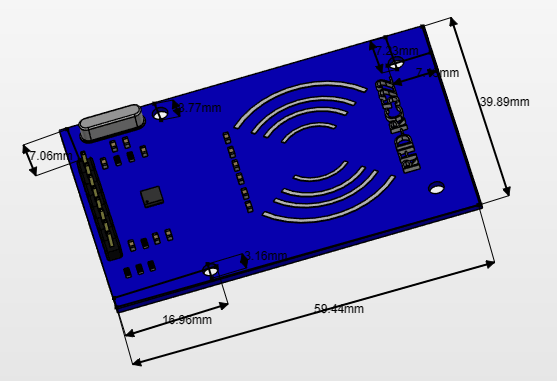
Abb.8: Bemaßung der SeitenwändeAbb.9: Bemaßung des RFID-Sensors2
Die Abb.8 stellt die Bemaßung der Seitenwände dar, wobei das linkste Element die Vorderseite, das mittlere Element die beiden Seiten und das rechteste Element die Rückseite abbilden. Die Vorderseite ist 96 mm breit und eine Höhelänge von 290 mm. Sie beinhaltet eine Aussparung für den RFID-Sensor (siehe Abb.9), sodass dieser durch eine 2 mm Gravur des unteren Teils der Aussparung eingesetzt werden kann. Daneben befindet sich eine Aussparung für einen Standrad-Taster, welcher eine Länge und Breite von 6 mm besitzt.
Die Seitenwände haben die selben Grundmaßen wie die Vorder- und Rückseite (96mmx290mm). Die Rückseite beinhaltet eine Bohrung mit einem Durchmesser von 25 mm. Sie dient für die Stromversorgung und hat die selben Maßen für die Steckvorrichtung wie die Vorderseite.
Nach der Session im Makerspace am Freitag (27.08.) haben wir bei der Unterbox bei den oberen platten zur Verbindung wie bei der Oberbox ebenfalls einen Quader in der Mitte zur Verbindung der beiden Platten eingefügt. Am Montag haben wir dann die noch fehlenden Platten und die Acrylglasscheiben mit dem Lasercutter ausgeschnitten und die Gravierung für die Vorderseite der Unterbox hinzugefügt. Bei dem 3D-Druck des Prismas ist leider beim Drucken das Filament ausgegangen, weshalb wir dieses ausgetauscht haben, damit der Druck fortgesetzt werden kann. Der Druck der Säulen hat leider nicht so gut funktioniert, weshalb wir diesen nochmal mit einem eigenen 3D-Drucker wiederholen, nachdem im Makerspace immer mehr von diesen ausfallen.
Update:
Der 3D-Druck der Säulen hat zwar nicht perfekt gepasst, konnte aber durch Nachbearbeitung passend gemacht werden. Ansonsten haben wir uns am 03.09 nochmal in der Uni getroffen, um den Kasten zusammenzuleimen. Trotz mancher Verformungen des Sperrholzes passen die Teile gut zusammen.
Es sind jedoch auch Probleme aufgetreten: Die Säulenstücke wollten nicht aneinanderhalten, weshalb diese über die Acrylglasscheiben fixiert wurden. Des Weiteren ist aufgefallen, dass trotz genauer Planung beide Kästen, insofern die Motoren eingebaut sind, nicht perfekt aufeinanderpassen, dies konnten wir zwar nicht beheben, stört aber auch nicht so sehr.






{kind=link}
{kind=link}