Als Hardware entschied sich unsere Gruppe einen Motor und einen Mikrocontroller zu verwenden.
Servomotor:

Der Servomotor aus Abbildung 3 dient dazu präzise und zuverlässige Steuerungen zuzulassen. Er ist dafür zuständig, das Gelenk im Inneren der Vorrichtung so zu bewegen, dass der “An-Knopf” gedrückt werden kann.
Im inneren des Servomotors befinden sich ein Gleichstrommotor, ein Potentiometer und der Steuerkreis.
Das Funktionsprinzip des Servomotors wird nachfolgend beschrieben:
Schritt 1: Der Servomotor empfängt ein Steuersignal und dreht sich in die gewünschte Position. Normalerweise kann sich ein Servomotor nur innerhalb eines bestimmten Winkels drehen, doch in unserem Fall lassen wir den Servomotor bis zu 180 Grad drehen.
Schritt 2: das Potentiometer kann die Position der Welle erkennen, wenn der Motor dreht. Erreicht die Welle den gewünschten Winkel, erkennt der Steuerkreis dies über das Potentiometer und hält den Motor an. Dann kommt der zum Anfangspunkt zurück.
Mikrocontroller:
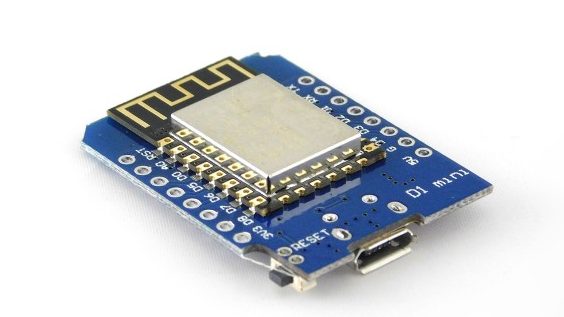
Der Mikrocontroller aus Abbildung 4 dient zur Weiterleitung von präzisen Steuersignalen an den Servomotor aus Abbildung 3 und als Verbindungspunkt für unsere Website / App, worüber das An-/Aussignal gesendet wird.
Der WeMos D1 Mini-Modul (Abbildung 4) basiert auf den ESP8266 ESP-12F Wi-Fi Mikrocontroller und kann somit mit der Arduino IDE programmiert werden. Mit der Steuerung durch Arduino beschäftigen wir uns in dem Kapitel “Software”.