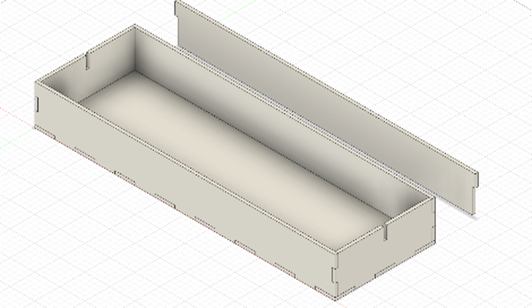
Der erste Schritt war, die vorhandene Datei zu downloaden und zu öffnen. Bei etwas Einarbeitung in die Software wurde schnell die Struktur klar welches die Erstellung der Lasercut Box erleichterte.
Die Trennwand neben der Box wurde gelöscht, da diese nicht mehr benötige wurde. Ebenso wurden die Parameter von der Länge, Breite und Höhe geändert in 150 mm x 65 mm x 6 mm, sowie die Anzahl der Trennwände in der Länge auf 1 gesetzt.
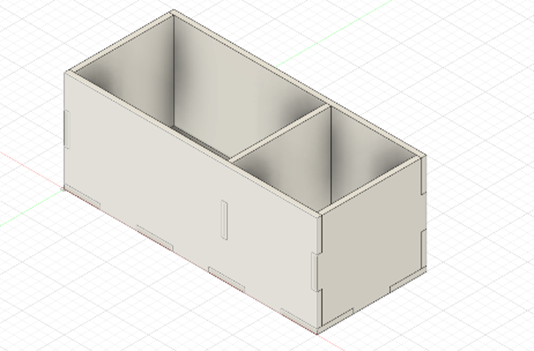
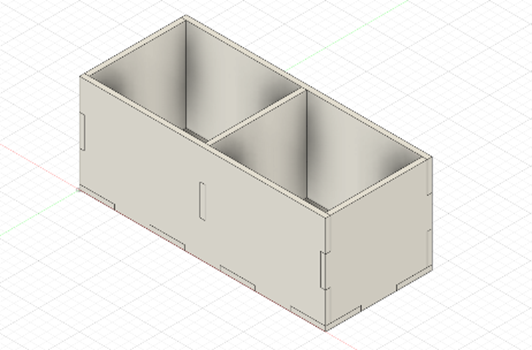
Das nächste was gemacht werden musste ist, die Trennwand zu versetzten in Längenrichtung. Ebenso mussten auch die Löcher für die Trennwandhalter versetzt werden.
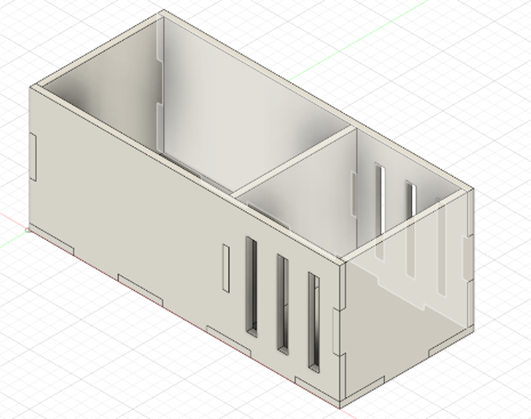
Der nächste Schritt war, die Luftlöcher für den Motor zu erstellen. Da zu der Zeit der Motor schnell warmgelaufen ist, mussten viele große Luftlöcher erstellt werden, damit die Hitze entweichen kann. Ebenso konnte die Motorwelle durch den mittleren Luftdurchlass durchgesteckt werden und in der höhe eingestellt werden. Der Abstand der beiden äußeren Löcher hat per Zufall perfekt gepasst zu den Löchern auf dem Motor. Dadurch konnte einfach der Motor an der Box fixiert werden.
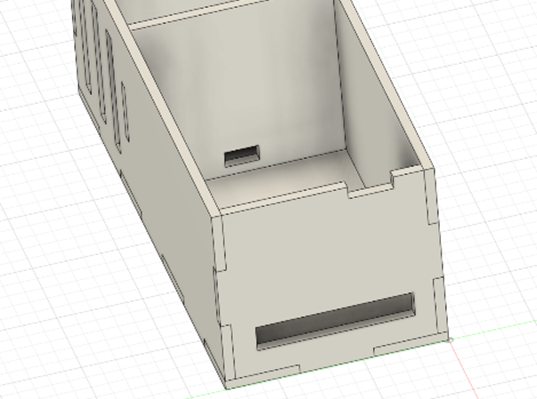
Der letzte Schritt war die Löcher für die Kabel zu machen. Dafür wurde zum einen ein kleines Loch gemacht für die Kabel vom Stepper Motor und zum anderen ein großes Loch gemacht für die Stecker von der Platine. Sodass wir einfach an den Arduino herankommen falls nötig. Die Auskerbung oben an der Seite der Box ist für das Stromkabel vorgesehen.
No responses yet