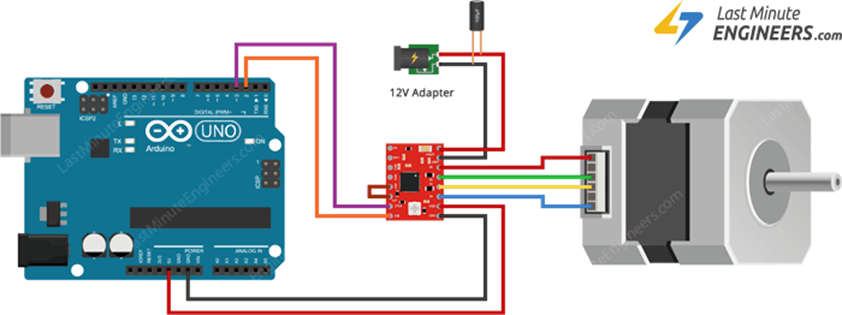
Um das Projekt durchzuführen, wurde anfangs einen Motortreiber-Shield, einen Schrittmotor, Zahnriemen und einen Arduino Uno eingesetzt. Es wurde aber schnell festgestellt, dass das der eingesetzte Motortreiber nur mit Gleichstrommotoren läuft, zudem hatte der Motor mit einer Nennspannung von 3V, zu wenig Kraft um ein Thermostat zu drehen.
Daher wurde später auf ein CNC- Shield mit einen Schrittmotor-Driver und einem stärkeren Motor gewechselt. Dies hat auch funktioniert, jedoch ist festgestellt worden, dass ein Wackelkontakt vorliegt und der Arduino UNO keine Wlan Konnektivität besitzt.
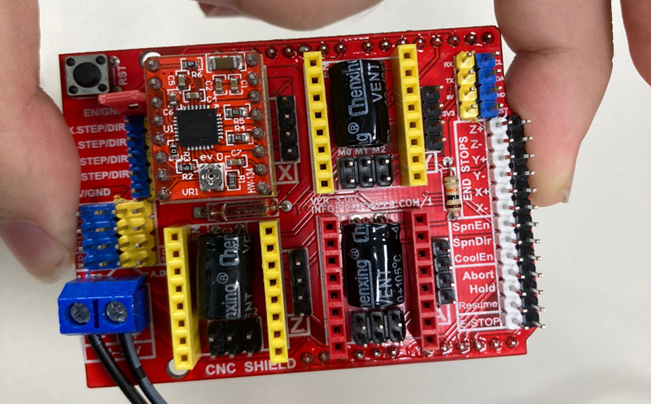
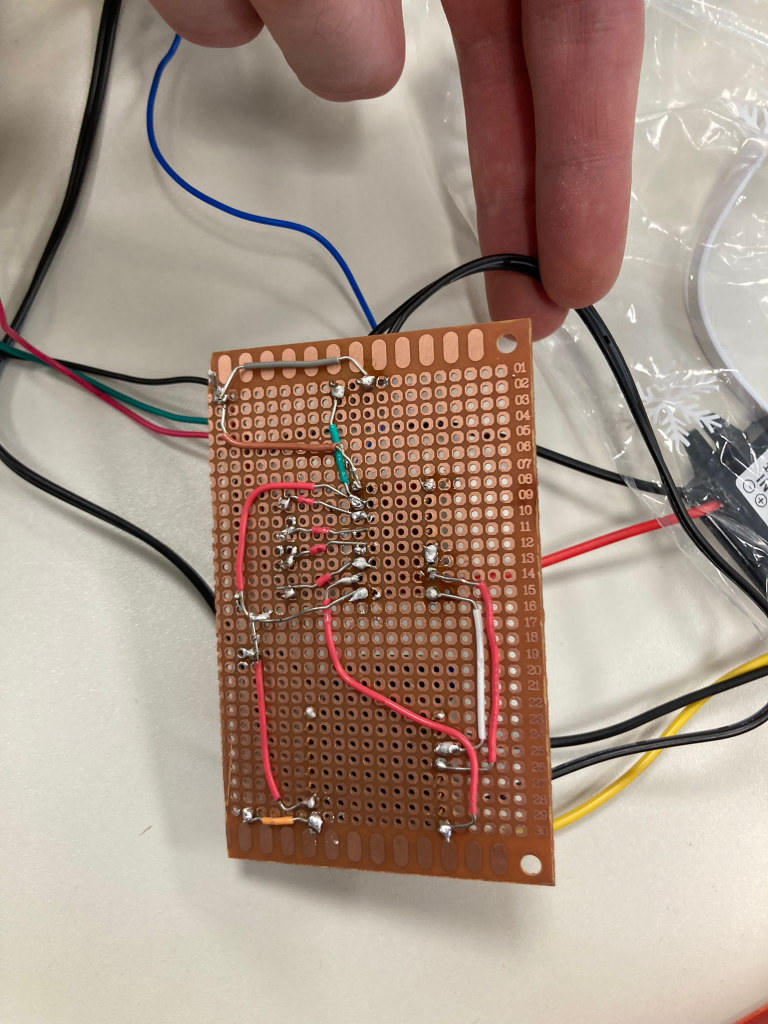
Nun wurde, statt des Arduino UNO, auf einen ESP8266 gewechselt, welcher Wlan besitzt. Zudem haben wurde entschieden, dass das CNC Shield (aufgrund des Wackelkontaktes) nicht mehr genutzt wird und stattdessen ein Schrittmotor-Driver direkt mit dem ESP verlötet wird. Dies funktionierte dann bis zum letzten Treffen. Hier ist der Motor dann, vermutlich aufgrund des Widerstandes durch das Reiben an der Holzbox, durchgebrannt. Daher wurde der Motor zum Schluss ausgewechselt, und das Loch, durch welches der Motor herausguckt, vergrößert.
Schlussendlich wurde ganze Hardware endgültig in einer Holzbox befestigt und der Riemen um den Motor und das Thermostat gespannt. Beides wurde vorher noch an eine Holzwand festgeklebt um dies besser Präsentieren zu können. Der Motor bewegt dann den Riemen, welche dann in eine Bewegung des Thermostats übersetzt wird.

No responses yet