Die Idee ist es in dem Rohr ein Paddelrad (ähnlich dem eines Raddampfers) von einem Motor drehen zu lassen. Es muss sich um einen langsamdrehenden “high-torque” (zu deutsch: hohes Drehmoment) Motor handeln, damit dieser in der Lage ist, zuverlässig das Futter in die Freiheit zu entlassen.
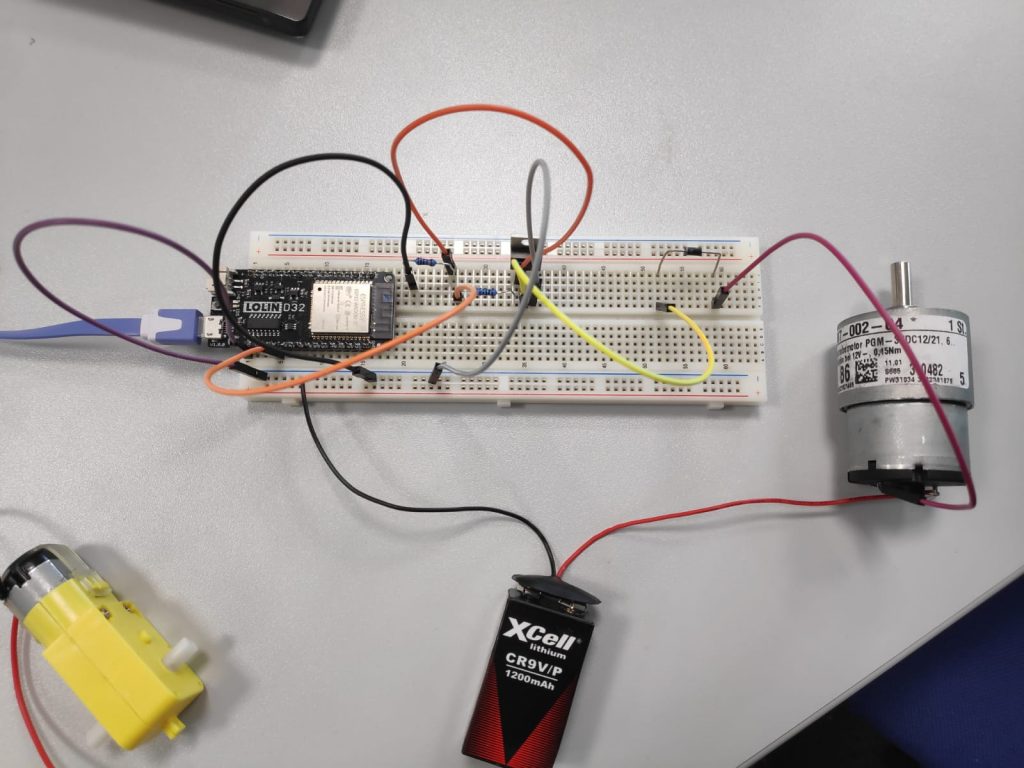
Im obigen Bild ist ein Versuchsaufbau zu sehen, mit welchem ich teste, wie eine Steuerung einer Stromversorung funktionieren kann, wenn ein Bauteil mehr als die vom Microcontroller zur Vefügung gestellenten 3,3 Volt benötigt.
Hier verwende ich noch eine 9 Volt Batterie. Der Gleichstrommotor ist jedoch auf 12 Volt ausgelegt. Mit 0,45 Nm sollte er dann auch kräftig genug für mein Vorhaben sein. Da ich jedoch keine 12 Volt Batterie habe und die Katzenfuttermanschine zuverlässig funktionieren soll, wird ein 12 Volt Trafo zukünftig zum Einsatz kommen.