Dieses Projekt wird innerhalb des Sommersemester 2019 durchgeführt. Es gliedert sich dabei in mehrere Phasen.
Phase 1: Themenfindung
Zeitgleich mit der Belegung dieses Moduls, hatte ich privat das Problem, dass eine Fernbedienung für das elektrische Garagentor meiner Garage kaputt ging. Da dieses Tor aus den 80ern kommt, ist es inzwischen schwierig Ersatzteile zu bekommen. Daher hatte ich schon lange überlegt, wie ich dieses Problem beheben könnte. Eine Idee war zunächst das Funksignal, das die Fernbedienung ausgibt, abzufangen und nachzuprogrammieren. Aber warum so kompliziert? Das Smartphone ist sowieso immer griffbereit und könnte für die gleiche Funktionalität sorgen. So war also schnell klar, dass ich mein Garagentor smarter machen möchte. Dieses Modell gibt zumindest ungefähr wieder, wie so etwas aussehen könnte.
Phase 2: Hardware
Zunächst einmal musste ich mir Gedanken machen, welche Kernfunktionen die Garagentorsteuerung bieten muss. Neben der offensichtlichen Funktion das Garagentor auf und abfahren zu können, sollte natürlich auch irgendwie ein Sensor erkennen, in welchem Status sich das Tor derzeit befindet; Offen oder geschlossen.
Die einfachste Möglichkeit diese Funktionalität zu gewährleisten ist ein Magnetkontaktschalter. Das Problem war lediglich, dass der Magnetkontaktschalter, den ich benutze aufgrund seiner billigen Verarbeitung nicht 100% zuverlässig arbeitet. Hier empfiehlt es sich also ruhig einen Euro mehr auszugeben.
Außerdem sollte jedes Garagentor aus Sicherheitsgründen stoppen, wenn sich Personen oder Gegenstände unterhalb des Tores befinden. Hier wird es dann schon schwieriger. Um die komplette breite Abzudecken entschied ich mich für eine Lichtschrankentechnik. Also eine Laserdiode, welche auf einen Photoresistor ausgeriechtet ist. Solange der Photoresistor das Licht der Laserdiode erkennt ist also kein Hindernis im weg. Ist der Lichtstrahl unterbrochen befindet sich ein Hindernis unter dem Garagentor und die Herabfahrfunktion kann gesperrt bzw. gestoppt werden. Wichtig ist hierbei, dass die Laserdiode akkurat ausgerichtet ist und der Photoresistor von anderweitigem Licht abgeschirmt wird, da er sonst auch bei direkter Sonneneinstrahlung auslösen könnte auch wenn die Laserdiode kein Licht spendet. Dazu habe ich den Photoresistor so verbaut und abgeschirmt dass kaum anderes Licht als das der Diode auf den Resistor trifft.
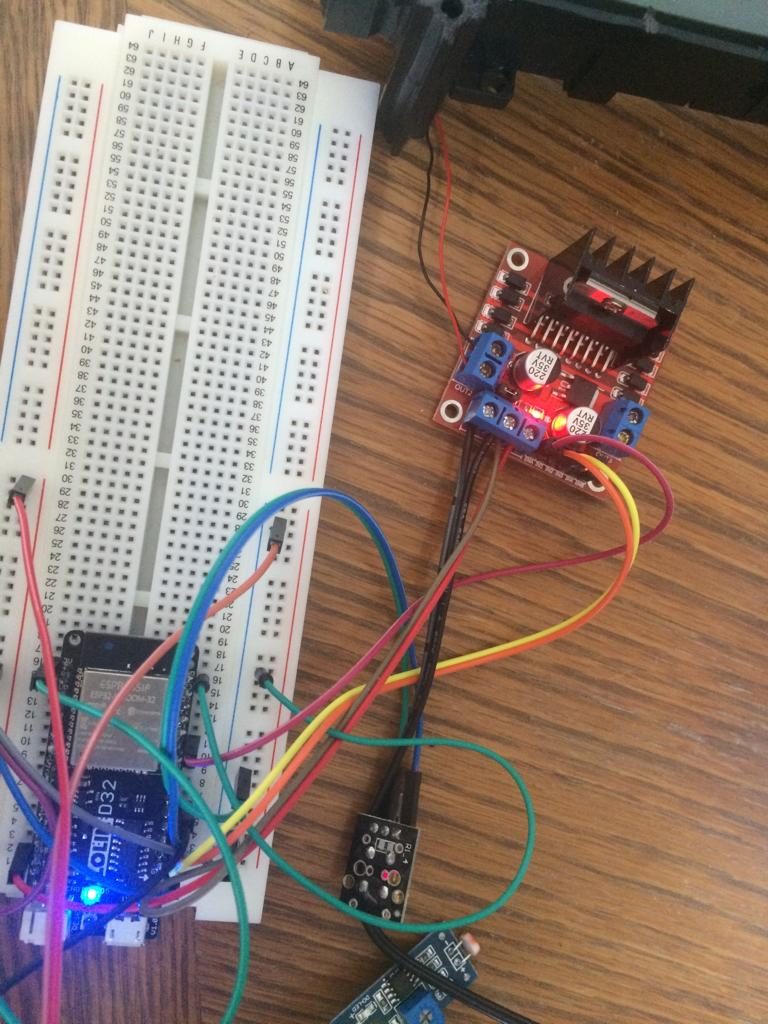
Zur Planung und Probe bietet es sich an die Schaltung zunächst auf einem Breadboard nachzustecken. Hier können immer wieder Änderungen schnell und simpel durchgeführt werden bevor es später an das richtige Modell geht.
Für das Tor selbst habe ich erst überlegt ob und wie so ein Modell nachgebaut werden kann. Aber da das viel Bastelei erfordert, hatte ich dann die Idee einfach ein Laufwerk zu nehmen, welches grundsätzlich genau die gleiche Funktion bietet, nämlich das Raus und Reinfahren des Laufwerks. In den unzähligen Tests zur Bestimmung der richtigen Versorgungsspannung für den Betrieb des im Laufwerks verbauten Elektromotors ist mir leider nicht aufgefallen, dass ich später das Laufwerk ja vertikal betreiben möchte. Daher musste ich nach fertigstellung des Modells in der Programmierung noch Drehgeschwindigkeiten anpassen, da aufgrund der Schwerkraft der relativ Leistungsschwache Motor nach oben langsamer läuft als nach unten. Letztendlich bin ich mit der Wahl des Laufwerks jedoch relativ zufrieden.
Für die Steuerung hat die Universität einen Lolin D32 µC bereitgestellt, der zwar für diese Zwecke etwas überdimensioniert ist jedoch genau die Funktionen erfüllen kann, die gebraucht werden.
Phase 3: Die Software
Als dann die verwendete Hardware bestellt und geliefert wurde, ging es an die Programmierung. Ich habe mich entschieden möglichst viel in eigenen Methoden zu schreiben um den Programmcode übersichtlich zu halten. Aufgrund der Vorerfahrungen im programmieren mit C/C+ und Java gab es hier kaum Schwierigkeiten. Für die Programmierung wurde mit der Software Arduino IDE gearbeitet, die ich ebenfalls im Vorfeld bereits kannte. Einlesen musste ich mich lediglich in die Methoden und Funktionen der Blynk App.
Blynk ist eine Smartphone Applikation, welche zur Steuerung von Arduino und ESP Mikrocontrollern entwickelt wurde. Die Universität bietet für diese App einen eigenen Server mit dessen Hilfe man die volle Funktionalität kostenfrei nutzen kann.
Ich hielt es für sinnvoll die Smartphone Bedienung so kompakt und simpel wie möglich zu halten. Daher verfügt sie lediglich über zwei LEDs und zwei Taster; Blockade-Anzeige, Status-Anzeige, Start-Taster und Stopp-Taster.
Phase 4: Fertigstellung
Nach Fertigstellung der Software konnte nun endlich Hard- und Software zusammengeführt werden. Das Modell wurde fertiggestellt und Arbeitsschritte protokolliert. Ich habe überlegt, dass man der Garage durchaus noch einen passenderen Look geben könnte wie eine steingemalte Fassade o.Ä., habe mich aber dagegen entschieden.
Ich hoffe dieses Projekt gefällt euch und wünsche viel Spaß beim Nachbauen, Optimieren und Anpassen.